
Hier ein Fachaufsatz, über die verschiedenen Antriebe für Fahrzeuge, deren Eigenschaften und Historie
Des Öfteren staunen Laien, über die guten Anzugskräfte von Elektroautos. Sind den Elektromotoren nun immer stärker als die bekannten Diesel- oder Benzinmotoren?
Zusammenfassung
Ja und nein – Denn ein wesentlicher Unterschied, ist der (relativ) ruhige Anzug eines Autos mit Elektromotor, im Gegensatz zum „aufbrüllen“ eines großvolumigen Benzinmotors.
Aber – kein Vorteil ohne Nachteil: Da noch keiner eine Atombatterie erfunden hat, braucht man entweder Batterien (also Akkumulatoren) mit möglichst großer Kapazität oder eine ganz lange Anschluss-Schnur (letzteres ist als Scherz gemeint), Oberleitung oder dritte Schiene wie bei den elektrischen Bahnen. Daher, die Energieversorgung ist hier der Knackpunkt!
Während der Elektroantrieb bei Schienenfahrzeugen nicht in der Diskussion steht, probiert man immer mal wieder Dieselantriebe für nicht elektrifizierte Nebenbahnstrecken durch Batterie oder gar Brennstoffzellen gespeiste Elektroantriebe zu ersetzen.
Die große Politik versucht auch im Privatbereich die batteriebetriebenen Elektroautos gegen jedes Gegenargument zu bevorzugen. Doch bereits 1888 konnte man nutzbare Autos mit Batterieantrieb kaufen. Es ist also ein ziemlich alter Hut. Der große Boom ging dann wohl auch nur bis 1911. Mit der Verbesserung der Verbrennungsmotoren und der Erfindung des elektrischen Anlassers, wurden die Autos immer einfacher in der Handhabung, der Aufbau von Tankstellen und mit ihnen die simple Betankung in kürzester Zeit und die große Reichweite waren sehr attraktiv. Mit Beginn der industriellen Serienfertigung brachte die Mobilität für viele Menschen individuelle Freiheiten und Chancen auch für die Nutzung von entfernteren Arbeitsplätzen.
Ende der Zusammenfassung
von Andreas Demmig
Beim Niederschreiben der Gedanken zu diesem Thema, habe ich vor allem immer wieder viel gelöscht. Es soll kein Fachbuch für mehrere Semester Studium werden.
Wer jedoch zum Einstieg gerne mehr wissen will – das Nachfolgende gibt einen groben Überblick.
Historie
Als wirtschaftliche und jederzeit betriebsbereite Antriebsquelle gab es ab dem Beginn des 19ten Jahrhundert die Dampfmaschine, die dann auch auf bzw. als Lokomotive breite Verwendung fand. Der mitgenommene Energievorrat reichte bis zu 700km [BR 41 Mehrzwecklokomotive]. Anfangs wurde Holz, wenn möglich Steinkohle und später sogar Heizöl verwendet.
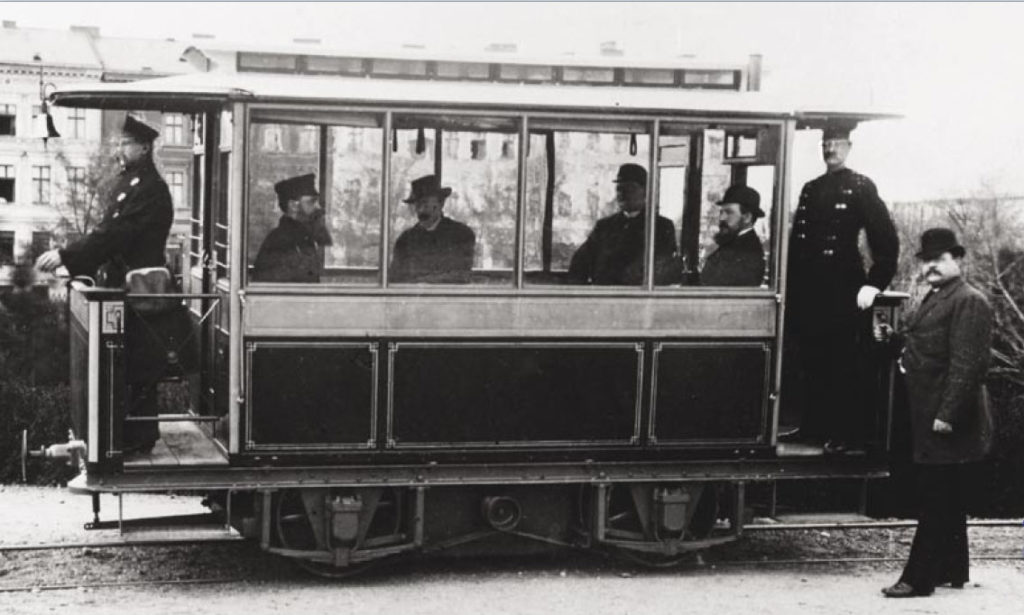
Die erste Bahn mit Elektroantrieb in Deutschland wurde von Werner Siemens [Adelung „von“ 1888 durch Kaiser Friedrich III] auf der Gewerbeausstellung 1879 den staunenden Besuchern vorgeführt – „Wo ist denn das Pferd?“

Siemens Archiv – Gemeinfrei, https://commons.wikimedia.org/w/index.php?curid=25073177
Die erste elektrische Straßenbahn wurde dann in Berlin 1881 von Siemens in Betrieb genommen. Stromzuführung über die beiden Schienen [Sie kennen es z.B. von den Modellbahnen], 400 VDC. Die notwendige technische Weiterentwicklung brachte dann die ungefährlichere Stromzuführung über Oberleitung und dritte Schienen (U-Bahn).
Siemens Archiv, Erste elektrische Straßenbahn in Berlin – Lichterfelde 1881
Siemens war sehr rührig und stellte 1882 den ersten Oberleitungs-Bus vor, ebenfalls in Berlin.
Akkumulator Triebwagen
Probeeinsätze gab es bereits ab 1895 für den Betrieb auf Nebenstrecken. Heutzutage gibt es für den Betrieb auf nicht elektrifizierten Strecken ebenfalls wieder Neu-Bestellungen.
https://de.wikipedia.org/wiki/Akkumulatortriebwagen
Einschub: Im Allgemeinen sind wir es gewöhnt, die Leistung einer elektrischen Maschine in kW und bei einem Verbrennungsmotor in PS anzugeben (auch wenn die Normung uns seit 1978 auch dafür kW vorschreibt). Was wir aber brauchen, ist das Antriebsmoment, bei einem Motor mit Welle auch Drehmoment genannt.
Dampflokomotive
Mittels eines Brennstoffes wird Wasser in einem Druckkessel erhitzt, der entstehende heiße Dampf drückt auf den Kolben. Die Idee, mit Dampf eine Maschine anzutreiben, gab es bereits im 17 Jahrhundert. Verschiedene schlaue Erfinder haben das dann verfeinert, es stand der Wunsch im Vordergrund, eine vom Wetter unabhängige und zuverlässige Antriebsquelle für Maschinen und Werkzeuge zu haben.

Demmig_Dampflok BR01_Zylinder
Dieser Zylinder treibt über eine Kolbenstange das Rad wie an einer Kurbel an. Die anderen Räder sind über Kuppelstangen verbunden. Der Raddurchmesser zeigt, dies ist eine Schnellzuglokomotive.
Eigenschaften: Hohes Drehmoment bereits im Stillstand, die maximale Drehzahl ist eher begrenzt. Zum endgültigen Erfolg verhalfen der Lokomotive die Brüder STEPHENSON https://www.lernhelfer.de/schuelerlexikon/physik/artikel/dampfmaschine#
https://www.wissen.de/wortherkunft/lokomotive
Die noch vorhandene Rest-Wärme des „verbrauchten“ Dampfes kann für die Heizung genutzt werden.
Kolbenmotor
Entzündlicher Brennstoff (Benzin, Gas oder Diesel) wird mit der richtigen Luftmenge vom Kolben angesaugt und vermischt (Varianten: Turbo – Unterstützung, Einspritzung), die Zündung wird last- und drehzahlabhängig verstellt, die entstehenden Verbrennungsgase drücken auf den Kolben. Über eine Kurbelwelle wird das wie vorstehend in eine Drehbewegung umgesetzt.
Kein Antriebsmoment im / ab Stillstand – da der Kolben (die Kurbelwelle) bewegt werden muss, damit der Energierohstoff überhaupt in den Verbrennungsraum gesaugt wird. Um überhaupt ein Drehmoment abgeben zu können, benötigt der Kolbenmotor eine gewisse Mindestdrehzahl. Die Füllung (der Energieinhalt) verändert sich mit der Drehzahl, damit auch die Drehmomentkurve. Getriebe sind notwendig, um das am Rad anliegende Moment an die unterschiedlichen Geschwindigkeiten und Steigungen anpassen zu können. Eigentlich viele Einschränkungen, jedoch muss es wesentliche positive Merkmale geben, warum diese Fahrzeugantriebe weltweite Verbreitung haben. Die heißen beim Brennstoff: Diesel oder Benzin hat einen hohen Energiegehalt und kann rel. gefahrlos im Tank mitgeführt und im Bedarfsfall schnell und unkompliziert aufgefüllt werden.. Im Winter gibt es (die Ab-) Wärme für die Passagiere kostenlos dazu
Funktionsweise eines Kolbenmotors: https://www.youtube.com/watch?v=vIJ50aUiBgM
Elektromotore
Der Elektromotor war eine geniale Entwicklung in der Mitte des 19. Jahrhunderts. Anfang des 20. Jahrhunderts wurde er aufgrund seiner vielfältigen Bauarten bzw. Eigenschaften auch für den Antrieb von Fahrzeugen eingesetzt. Da der Elektromotor seine Energie bereits „im Stillstand“ zugeführt bekommt, ist auch ab Start ein Drehmoment vorhanden.
Der Knackpunkt ist und war immer der „Energievorrat“.
Elektrische Bahnantriebe
Bei der Bahntechnik kommt die Energie über Fahrleitungen oder –schienen (U-Bahn) und Stromabnehmer zum Fahrzeug, noch von zuverlässigen Kraftwerken erzeugt. Für den öffentlichen Nahverkehr waren in vielen Städten vor rund 100 Jahren ebenfalls Busse mit Elektrotraktion an zweipoliger Oberleitung im Einsatz. Mit steigenden Leistungen der Dieselantriebe – und dem Verbot der Personenbeförderung im Anhänger – kamen die Oberleitungsbusse wegen zu hoher Kosten aus der Mode. Heutzutage sind die O-Busse zwar nicht billiger geworden, erleben jedoch eine Renaissance
Heizen und Kühlen ist wegen der Stromzuführung über Fahrleitungen kein Problem.
Elektroautos mit Batterie
Ganz anders bei den reinen Batterie-betriebenen Fahrzeugen [technisch korrekt muss man bei aufladbaren Batterien von Akkus s.o.sprechen). Um den Einfluß von zu hohen aber auch zu kalten Temperaturen auf Batterie zu mildern, heizt und kühlt Honda.
https://de.wikipedia.org/wiki/Geschichte_des_Elektroautos
Hier ein Blogbeitrag, der die Dynamik eines Tesla beschreibt
https://www.cbcity.de/zur-laengsdynamik-des-tesla-roadster-s
Hybridautos
Eine Variante, welche die Vorteile beider Antriebsarten nutzen soll, stellen die Hybrid-Autos dar. Diese Fahrzeuge fahren mit einem Verbrennungsmotor mit Schaltgetriebe, wie man das so kennt. Die (ggü. reinen Batterie Autos) nicht so große Batterie, dient zur Unterstützung des Antriebs, kurze Strecken (z.B. Stop-and-go) können rein elektrisch gefahren werden. Hondas Hybrid fährt ausschließlich elektrisch, der Verbrennungsmotor läuft in einer verbrauchsgünstigen Drehzahl und lädt ständig Strom nach. (bei etwa 100 km/h wird der Verbrenner starr mit der Achse verbunden – kein Schaltgetriebe – um auch die elektrischen Lade./Entladeverluste zu sparen)

Demmig_Detroit Electric Model Car, im Technikmuseum Speyer

Demmig_Technik Museum Speyer
https://de.wikipedia.org/wiki/Geschichte_des_Elektroautos
Elektromotore können ihrem Einsatzzweck entsprechend sehr flexibel hergestellt werden.
Antriebe für Fahrzeuge benötigen bereits ab Start eine hohe Anzugskraft [im Gegensatz z.B. zu einem Ventilator]. Das Drehmoment ist eine Funktion des Magnetfeldes und des Stromes.
Fast alle Antriebe mit Elektromotor (Bahnantriebe, Autos) haben ein einstufiges Getriebe, um die Baugröße klein(-er) zu halten und trotzdem genügen Startmoment zu haben. Es gab immer wieder mal Versuche auf das Getriebe zu verzichten. Es kommt auf die Gesamtübersetzung an, kleine Räder bringen Moment, große Räder mehr Geschwindigkeit (Dampflokomotiven haben aus dem Grund kleinere oder größere Antriebsräder). Ist die Gesamtübersetzung „lang“, benötigt der Motor einen großen Anfahrstrom – was den Motor schnell zu heiß werden lässt. Es ist also immer ein sinnvoller Kompromiss. Wie auch die Getriebeübersetzungen beim Auto mit Verbrennungsmotor. Volkswagen stattet seinen E-Golf mit einem 1-Gang Automatikgetriebe aus.
Nebenbei bemerkt: Ein Elektromotor kann zwar kurzzeitig höher belastet werden – wie lange er das aushält…? Haushaltsgeräte haben oft eine Angabe wie z.B. KB 10min oder ED 10min, d.h. der Motor ist auf Kurzzeit- oder Einschaltdauer … ausgelegt. Bei Antriebsmotoren gibt es auch unterschiedliche Angaben für Stundenleistung oder Dauerbetrieb. Neben konstruktiven Verbesserungen wurden die Leistungen von Elektromotoren vor allem durch verbesserte Isolationsmaterialien gesteigert: Spannungsfestigkeit und Temperatur.
Gleichstrommotor
Die klassische Ausführung für ein Fahrzeug ist ein Reihenschluss-Gleichstrommotor. Anhand der Kennlinie kann man m.E. die Grundlage gut verstehen. Das Moment und damit die gefahrene Geschwindigkeit kann durch die Spannung am Motor und das Feld der Erregerwicklung beeinflusst werden.
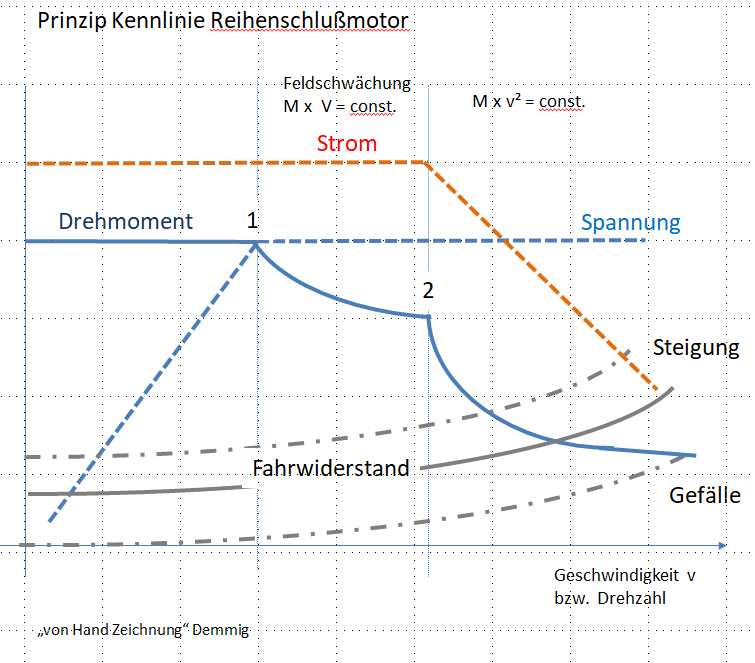
Der Motor wird mit maximalem Strom angefahren, das Antriebsmoment bleibt konstant, bis die maximale (gerade verfügbare) Spannung erreicht ist [bei Punkt 1]. Danach beginnt der Bereich der Feldschwächung, die so gesteuert wird (Shunt zur Spulenwicklung), dass der maximale Strom gehalten wird [bis Punkt 2]. Gemäß der natürlichen Kennlinie nehmen ab da der Strom und damit das Moment ab. Die Höchstgeschwindigkeit wird erreicht, wenn das Antriebsmoment dem Fahrwiderstand entspricht.
https://de.wikipedia.org/wiki/Einphasen-Reihenschlussmotor
Drehstrommotor
Aufgrund der Entwicklung von Leistungshalbleitern und der zugehörigen Steuerung, haben sich auch in der Antriebstechnik die kompakteren und belastbareren Drehstrommotoren durchgesetzt. In der hier hauptsächlich gebrauchten Bauart, bestehen diese Motoren aus dem Ständer (Gehäuse), in dem min. drei um 120° versetzte Wicklungen eingebaut sind. Diese Wicklungen werden mit gleichermaßen phasenversetztem Strom gespeist, so dass sich im Innern ein Drehfeld ergibt. Das Moment des Motors kann durch die Frequenz und die Spannung beeinflusst werden.
Spannung und Frequenz werden so gesteuert, dass sich eine gute Anfahrbeschleunigung und auch noch genügend Moment bei höherer Geschwindigkeit ergeben. Die oben gezeigter Kennlinie des Gleichstrommotors entspricht dem.
Der Läufer des Motors benötigt keine weiteren Anschlüsse nach außen. Er ist daher sehr robust und hat einzig die Lager, die aber erst nach längerer Laufzeit Wartung oder Austausch benötigen.
Man unterscheidet zwei Bauarten, die spezielle Eigenschaften zeigen.
Der Unterschied zwischen Synchron- und Asynchronmotoren liegt in der Arbeitsweise des Rotors. Beim Asynchron-Motor dreht der Rotor langsamer als das Statordrehfeld, also asynchron. Beim Synchronmotor dreht der Rotor (nur) nach der vorgegebenen Frequenz, also synchron.
Asynchronmotor
Der Läufer ist kompakt und mit einem kräftigen „Käfig aus Aluminium Stäben“ versehen. Die in diesem Käfig induzierten Ströme bilden selbst ein Magnetfeld, das den Käfigläufer dazu bringt, dem Drehfeld zu folgen. Das Moment ist vom Frequenzunterschied zwischen Drehfeld des Ständers zu der Drehzahl des Läufers abhängig. Der Läufer läuft von alleine an und kann maximal die „Drehzahl“ des Läufers erreichen. Bei Steigungen z.B. sinkt die Drehzahl des Motors, im Läufer wird ein kräftigerer Strom induziert, was ein höheres Moment zur Folge hat. Das Fahrzeug wird zwar langsamer, zieht bei Steigungen aber durch (so wie wir das von einem Verbrennungsmotor kennen, bei dem wir evtl. runterschalten müssen).
Tesla ist nach den Informationen im Web, der einzige Hersteller, der Asynchron Motoren für seine Fahrzeuge nimmt.
Synchronmotor
Die Läuferwicklungen haben beim Synchronmotor ein konstantes Magnetfeld. Im E-Auto sind im Läufer Dauermagnete eingebaut (Dafür werden diese seltenen Erden gebraucht, z.B. Neodym), um die ohmschen Verluste einzusparen. Dieser Motor läuft nicht selbsttätig an, die Umrichter im Fahrzeug fahren die Frequenz von quasi Null an, um dem Läufer „mitzunehmen“.
Das max. Drehmoment ist durch die „Kraft“ der Magnete begrenzt, die Überlastfähigkeit und die Toleranz gegen Momentstöße des Antriebes ist gering bis gar nicht vorhanden. Das abgegebene Drehmoment ist pulsierend (-er ggü. einer Asynchronmaschine –> Getriebe!?) Mit aufwendiger und schneller Elektronik (und SW) muss einem Synchronmotor das Verhalten einer Reihenschlussmaschine aufgezwungen werden. Die Regelung muss schnell und feinfühlig eingreifen, damit das Fahrzeug an Steigungen nicht „aus dem Tritt“ kommt.
Synchronmotoren haben außer Tesla, alle anderen, bekannten Hersteller verwendet. Viele Motoren werden außerdem gekühlt.
https://kfz-aufgaben.de/hv/11a_synchronmotor.htm
Vergleich der Prinzip Kennlinien
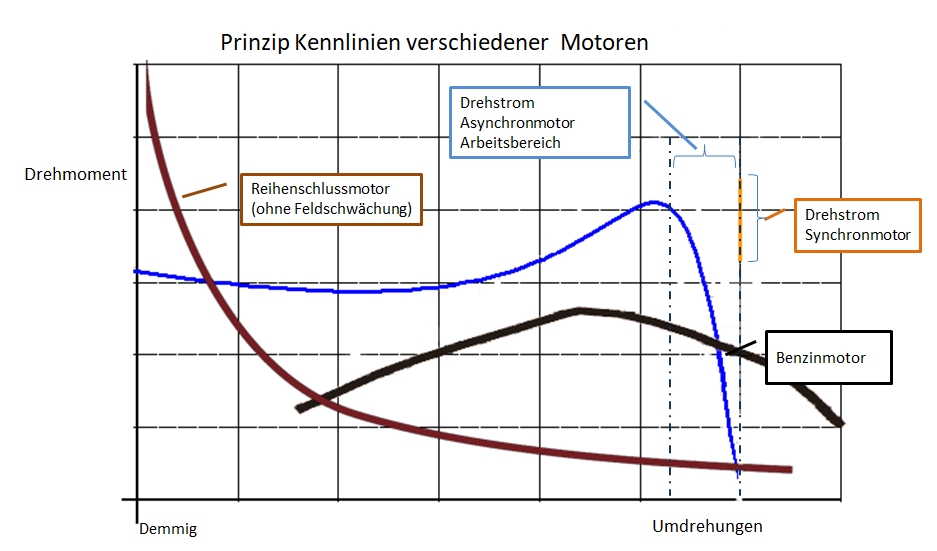
Die Kennlinien der Motore für geringere oder höhere Leistungsabgabe (gemeint: Drehmoment) verändern sich:
- unterschiedliche Spannungen verschieben die Kurve des Reihenschlussmotors nach rechts / links , s.o Punkt (1)
- unterschiedliche Spannungen verschieben die Kurve des Asynchronmotors nach oben / unten, beim Synchronmotor ist mehr oder weniger Moment vorhanden
- unterschiedliche Frequenzen verschieben die Kurve des Asynchronmotors und Synchronmotor nach rechts / links
- Beim Benzinmotor verschiebt sich bei mehr oder weniger „Gas“ in etwa parallel nach oben / unten
Obige Darstellung ist vereinfachend. Die mechanische(!) Leistung errechnet sich mit Moment x Umdrehung (plus Faktor zur Umrechnung). Was am Rad ankommt ist geringer, da Getriebe, Lager und ä. auch noch bewegt werden müssen.



{kind=link}
Wir freuen uns über Ihren Kommentar, bitten aber folgende Regeln zu beachten:
- Bitte geben Sie Ihren Namen an (Benutzerprofil) - Kommentare "von anonym" werden gelöscht.
- Vermeiden Sie Allgemeinplätze, Beleidigungen oder Fäkal- Sprache, es sei denn, dass sie in einem notwendigen Zitat enthalten oder für die Anmerkung wichtig sind. Vermeiden Sie Schmähreden, andauernde Wiederholungen und jede Form von Mißachtung von Gegnern. Auch lange Präsentationen von Amateur-Theorien bitten wir zu vermeiden.
- Bleiben Sie beim Thema des zu kommentierenden Beitrags. Gehen Sie in Diskussionen mit Bloggern anderer Meinung auf deren Argumente ein und weichen Sie nicht durch Eröffnen laufend neuer Themen aus. Beschränken Sie sich auf eine zumutbare Anzahl von Kommentaren pro Zeit. Versuchte Majorisierung unseres Kommentarblogs, wie z.B. durch extrem häufiges Posten, permanente Wiederholungen etc. (Forentrolle) wird von uns mit Sperren beantwortet.
- Sie können anderer Meinung sein, aber vermeiden Sie persönliche Angriffe.
- Drohungen werden ernst genommen und ggf. an die Strafverfolgungsbehörden weitergegeben.
- Spam und Werbung sind im Kommentarbereich nicht erlaubt.
Diese Richtlinien sind sehr allgemein und können nicht jede mögliche Situation abdecken. Nehmen Sie deshalb bitte nicht an, dass das EIKE Management mit Ihnen übereinstimmt oder sonst Ihre Anmerkungen gutheißt. Wir behalten uns jederzeit das Recht vor, Anmerkungen zu filtern oder zu löschen oder zu bestreiten und dies ganz allein nach unserem Gutdünken. Wenn Sie finden, dass Ihre Anmerkung unpassend gefiltert wurde, schicken Sie uns bitte eine Mail über "Über Uns->Kontakt"Hallo Mia Roth,
erstmal möchte ich Sie ausdrücklich loben, im Gegensatz zu den Batterie- und Solarverherrlicher versuchen, Sie, technische Details zu verstehen und darauf argumentativ einzugehen, anstatt Parolen zu schwingen!
Zu Ihren Anmerkungen:
Auf der Stromautobahn kann man sich nur im Geschwindigkeitsbereich 48 – 52 Hz bewegen (kann man durchaus mit einer Reihenfahrt mit 48 – 52 km/h auf der Straße vergleichen), sonst kracht es. Kleine Schwankungen werden mit der Masse ausgeglichen, summierte mit dem Gaspedal. Die ungesteuerten, vom Wind abhängigen Mühlen zappeln im Bereich 0 bis 3 km/h, daher ist Ihre Schwungmasse nur störend und nicht regelnd. Um überhaupt auf die Autobahn zu kommen, wird in Gleichstrom und dann wieder in 50 Hz Wechselstrom umgewandelt. Solar und Batteriestrom ist sowieso immer Gleichstrom (Jede Batterie hat Plus und Minus, der Stecker zu Hause nicht) und muss dem Netz angepasst werden und kann die Frequenz an sich nicht steuern.
Es ist richtig, dass Batterien die Differenz zwischen Angebot und Nachfrage im Netz ausgleichen können, im Rahmen ihrer Grenzen. Es ist aber immer eine Frage der Dimension. Mit der Handybatterie können Sie nicht das Zuschalten des Herdes (um die 5-6 KW) ausgleichen, mit einer „Hausbatterie“ schon. Eine Ladestation für E-Autos hat 25 KW, Schnelllader 100 KW und mehr. Zum Vergleich: die 3 KW Steckdose hat ein Anschlußkabel von 3 mm2, Das Haus mit 25 KW 16 mm2, der Schnellader braucht ein armdickes Kabel. Versucht man einer „Hausbatterie“ einen Schnellader auszugleichen, knallt und brennt es. Das macht dann die Schwungmasse im Kraftwerk.
Die verlinkte Batteriestation soll nicht kleine Schwankungen ausgleichen, das macht ja die Schwungmasse in den Kraftwerken kostenlos, sonder soll den Winter und die Flauten mit EE-Strom überbrücken. Dafür sind sie viel zu teuer und mickrig klein. Man braucht dazu nicht MWh, sondern TerraWatth, dazwischen liegt noch Giga. Es fehlen also noch 6 Nullen in der Gleichung.
Mia Roth am 23. September 2021 um 10:28
Naja, (Wind)Strom kommt ja nicht nur aus Norddeutschland. Die Autos werden aber überall gefördert.
Also wenn sie jetzt 500.000 E-Autos haben, von denen 1/10 vielleicht in den Gebieten zugelassen werden in denen an ein paar Tagen extremer Überschuss herrscht, und von denen 10% dann vielleicht 50% , also effektiv 5% der ganzen deutschen E-Auto Flotte genau zu dem Zeitpunkt bei Überschuss an der Ladestation hängen und noch nicht voll geladen sind, dann sinkt das im schnitt vielleicht auf 650g Co2 / pro KWh. Deshalb, ich denke wenn die Zahlen für 2021 Rauskommen, wird man sehen wie viel immer noch abgeregelt werden muss. Und wenn 2022 noch Kernkraftwerke abgeschaltet werden, Steigt müssen auch wieder Kohle und Gaskraftwerke einspringen. Dann ist man wieder bei 700g 😉 Ich schätze vorsichtig, das von den 1000GWh bedarf der E-Autos höchstens 100GWh von der abgeregelten Leistung (ca. 6000GWh) aufgenommen werden.
Aber in der realen Welt ist es ja so, dass das Stromnetz unseren Strom nicht immer transportieren kann – wenn ein neuer Herd oder ein neues E-Auto hinzu kommt, dann fließt dieser zusätzliche Strom ja zunächst mal vom nächsten Kraftwerk in meiner Nähe. Das kann Kohle sein, muss aber nicht. Es kann Solarstrom sein, der ansonsten abgeriegelt würde, Windstrom, Wasserkraft, Gas, Atom – was eben gerade in meine mittlere Netzebene hereinfließt. Manche E-Autos tanken also mit Ihren 700, manche mit 300, manche mit 0 g CO2 pro KWH. Im Schnitt sollte man daher eher mit dem Strommix rechnen, meinen Sie nicht?
Das Problem ist auch, dass Sie ja gar nicht wissen können, wie oft eine Abriegelung VERHINDERT wurde durch ein E-Auto – deshalb sind dann auch die Zahlen von 2021 wenig aussagekräftig.
@ Mia Roth
Es geht nicht darum woher dieser Strom zunächst fließt, sondern woher er erzeugt wird. Wenn gerade viel EE erzeugt werden, sagen wir 90% weil Gerade Sonne scheint und Wind weht, dann ist dieser Strom durch Seinen Vorrang im Netz, egal wo und wird entsprechen verbraucht. Kommen jetzt Verbraucher hinzu, dann muss dieser Zusätzliche Strom erzeugt werden. Das kann Kohle,Gas,Kernkraft oder in ganz geringem maße Speicher, Biogas oder Wasserkraft sein (deise zusammen haben ca 10% an den EE und erzeugen ja meistens auch schon mit ), aber eben kein WIND und SOLAR weil diese ja schon komplett abgenommen werden. Der Mehrbedarf kommt deshalb von Kohle und Gas. Außer halt, es ist Überschuss, also z.B. 110% von denen 10% gerade abgeriegelt sind. Dann könnten die zusätzlichen Verbraucher sollten sie dazukommen von den bisher abgeregelten EE kommen.
Ja, ganz genau – da haben wirs doch: Wenn Überschüsse produziert werden, funktioniert dieser Einspeisevorang nicht. Dies geschieht ja mehrmals, täglich, überall. Das sieht man ja auch daran, wie Sie schon sagten,, dass Deutschland Strom exportiert. Falls man Kraftwerke immer so flexibel runter regeln könnte, wie es sagen, dann müsste wir ja gar nichts exportieren. Und diese Energiemengen sind ja nicht klein. Wenn Sie also alle abgeregelte Energie nehmen, dazu noch alle Exporte, dann könne man damit ja SEHR SEHR viele E-Autos laden, nehme ich an?
Ich würde Ihrer Logik ja zustimmen, wenn dieser Einspeisevorang tatsächlich funktionieren würde – da dies aber nicht dre Fall ist, können Sie den Mehrbedarf genauso mit gesparten Exporten oder Abregelungen abdecken. Da Strom ja stängig hin und her fließt und im- & exportiert wird, fände ich es eher plausibel, dass etwa die Hälfte der Ladevorgänge in Exportzeiten fallen. In dieser Zeit waren manche Kraftwerke offensichtlich nicht in der Lage herunterzufahren und Erneuerbaren Vorang zu gewähren.
In Deutschland sind derzeit zwischen 1,55 bis 1,65 oder gar mehr Euro/L zu zahlen.
https://de.statista.com/statistik/daten/studie/29999/umfrage/zusammensetzung-des-benzinpreises-aus-steuern-und-kosten/
Anteil Abgaben, Steuern, 96,9 ct/L
War gerade in Österreich, dort sind es meist um 1,36 €/L, das Preiswerteste waren 1,249 €/L
Elektrofahrzeuge wiegen wegen der Akkumulatoren rund 500 Kilogramm schwerer als konventionelle PKW vergleichbarer Größe, obwohl der Elektromotor an sich leichter ist. Dieses mehr an Gewicht erhöht nicht nur den Rollwiderstand, sondern verschlingt auch zusätzliche Energiereserven bei der Überwindung von Höhenmetern. Vor allem aber erfordert dadurch jede Beschleunigung einen höheren Energieeinsatz zur Überwindung der Trägheit. Dem Vorteil eines nicht benötigten Leerlaufes und eines maximalen Drehmoments vom Stand steht daher der Nachteil eines maximalen Energieverbrauchs bei Beschleunigungen ab einer höheren Geschwindigkeit (mit einem schwächeren Drehmoment) gegenüber, was Berichte über ein programmgesteuertes Abregeln der maximal möglichen Beschleunigung bei höheren Geschwindigkeiten verständlich macht. Bei der Reichweite werden Elektrofahrzeuge daher immer den treibstoffgetriebenen Fahrzeugen hinterherhinken, solange es zu keinen Durchbrüchen in der Akkumulatorentechnik kommt.
Wo ist nun der Energieeinsatz für die 100km größer?
Mein E-Auto zieht über den Stromzähler ca. 20kWh/100km in
der Regel PV-Strom im Jahresdurschnitt und ein vergleichbarer konventioneller
PKW ca. 60kWh an Energie über die Tankuhr an der Tankstelle.
Werte Frau Fröhlich,
Ihre Antwort weckt in mir den Verdacht, Sie hätten meinen Beitrag nicht bis zum letzten Satz gelesen. Das könnte ja mal vorkommen, so ein Schnellschuss, wenn man wie Sie besonders engagiert ist. Ich jedenfalls habe nicht den Energieeinsatz eines Elektrofahrzeuges mit demjenigen eines PKW mit Verbrennungsmotor verglichen (das taten Sie – vielen Dank auch für die Info!), mir ging es nur darum klarzumachen, wie sehr sich höheres Gewicht auf die Reichweite auswirkt („zusätzlicher Energieeinsatz“), so dass auch die tollsten TESLA-Konstruktionen kaum mehr als 500 km Reichweite nach dem WLTP-Testzyklus schaffen. Wobei dieser Test, was ich im Internet auf die Schnelle in Erfahrung bringen konnte, zwar knapp 10 „scharfe“ Beschleunigungsphasen mit mind. 40 km/h Differenz über rund 30 Minuten, aber keine Bergfahrten zu enthalten scheint.
@Ute Fröhlich
Ganz klar bei Ihrem E-Auto. Der deutsche Energiemix hat zur Zeit aufgrund der EE 366Gram pro kWh, im Jahr 2000 mit geringerem Anteil EE waren es noch 660gramm/kWh. Da wir aber noch nicht bei 100% EE sind wird jeder zusätzliche Verbrauch durch konventionelle Kraftwerke gedeckt, und zwar Langfristig bis die 100% erreicht sind. Es nützt auch nicht zu sagen wenn wir z.B. 5 gWh zusätzlich Strom durch E-Autos benötigen dann haben wir das in 1 Jahr durch 5 gWh Ausbau EE ausgeglichen, weil wir dann nur länger auf einer Stelle treten und die konventinellen Kraftwerke dadurch länger bestehen bleiben müssen.
So gesehen ist es derzeit also nur zulässig 20kwH * 660g CO2/kWh zu rechnen. Dann kommen sie auf 13,2KG CO2. Wenn Sie einen modernen Diesel mit großem Kofferaum und Reichweite mit einem Verbrauch von 4,5l / 100km nehmen, dann haben sie 4,5l * 2,64kg CO2/l = 11,88kg CO2 je 100 km.
Nur zu den 13,2kg CO2 von Ihrem E-Auto kommt noch der große CO2 Abdruck der Batterie hinzu (von den vielen anderen Umweltverbrechen mal abgesehen).
Erst wenn 100% EE ereicht sind, macht es überhaupt Sinn bestehende Verbraucher von konventioneller Energie auf Strom umzustellen. Und dann aber nicht mal E-Autos sondern z.B. eher Heizungen oder Warmwasser, da diese ja auch ohne zusätzliche Speicher funktionieren würden.
@ Lubert Stiller,
auch wenn ich genauso wenig wie Sie zwangsfinanzierte Beförderungsmittel leiden kann, muss ich Sie darauf hinweisen, dass nach flüchtigen Recherchen der Strommix ca 500 Gramm pro KWh enthalten dürfte, da das deutsche Umwelt-Bundesamt bereits für 2016 (hochgerechnete:) 527 Gramm angibt. Siehe dazu: https://www.umweltbundesamt.de/publikationen/entwicklung-der-spezifischen-kohlendioxid-3
1. Im Deutschlandweitem Strommix sind wir irgendwo bei ca. 400g CO2/kWh und nicht bei 660g CO2/kWh.
2. Er macht keinen Sinn das E-Auto standardmäßig mit Netzstrom zu laden bei 0,32€/kWh wenn PV-Strom nur ca. 6 Cent kostet und so machen das auch die allermeisten die ich kenne die ein E-Auto haben.
3. In Jahr 2020 wurden ca. +4,9GW Solarstromleistung neu errichtet, reicht für ca. +1,5 Millionen E-Autos. Im Jahr 2020 wurden unter +0,2 Millionen E-Autos neu zugelassen. Der gesamte Strom für die E-Autos werden um ca. das 8-fache von den neun Solarstromanlagen ausgeglichen ohne das ein Kohlekraftwerk nur 1 MWh zusätzlich im Jahr bringt. Im Gegenteil die MWh Strom aus den Kohlekraftwerken verringern sich durch die E-Autos + Solarzbau.
4. Solarstrom ist bei ca. 0,05kg CO2/kWh
0,05kg CO2/kWh * 20kWh/100km = ca. 1kg CO2 je 100km und Ihr Verkehrshindernis mit 4,5l /100km ist bei ca. 12 kg CO2 je 100km. Da sind selbst die jetzt neu zugelassenen E-Autos und der Zubau an Solarstrom bei der Verwendung von Netzstrom unter 10% was Ihr Diesel PKW am CO2 in die Atemluft haut.
@Ute Fröhlich
Ich habe ja ausführlich erklärt, warum es nicht zulässig ist weder 400gr, noch 50gr anzusetzen sondern 660, solange wir nicht in Deutschland nicht 100% EE haben. Da hilft es auch nicht wenn Sie ihren eigenen Solarstrom laden, denn dafür muss dann halt jemand anderes, der sich keinen Solarstrom aufs Dach setzen kann weil er z.B. miete wohnt, mehr konventionellen Strom laden weil Sie weniger einspeisen. Und deshalb ist es egal wieviel GW EE im Jahr zugebaut werden, durch die Elektrifizierung von ehemals fossil betrieben Verbrauchern wird der Zubau entsprechend der Menge der Elektrifizierung vermindert. Aber ich merk schon, mit solchen Überlegungen sind Sie überfordert.
Genauso habe ich schon mehrmals vorgerechnet, warum es am Ende nichts nutzt 6ct (von Ihrer Solaranlage) oder 30ct vom Energieversorger anzusetzen, weil sie bei Ihrer Solaranlage vergessen, das Sie trotzdem irgendwann auch zur Instandhaltung der Stromnetze herangezogen werden (müssen) so wie jetzt schon Größere Solaranalgenbetreiber die EEG Umlage auf den Eigenverbrauch zahlen müssen. Genauso wie bei zunehmender Elektrifizierung der Autos der Staat die Mineralölsteuer von ca. 60ct wieder auf die Bürger umlegen, da er darauf nicht verzichten kann. Da können Sie ihren Kopf noch so tief in den Sand stecken, das wird trotzdem passieren.
Und die nötigen Speicher für den Winter sind immer noch nicht berücksichtigt. Ihr E-Auto trägt zur Speicherung auch gar nichts bei, denn sie werden mit einer vollen E-Autoladung nicht über den Winter kommen und schon gar nicht dazu noch Ihr Haus damit versorgen können. Da würde nicht mal die 10-Fache Speichermenge ausreichen. Aber sie können es ja mal versuchen und sich für 50.000€ Speicher in den Keller stellen, mal sehen wie weit sie kommen, ich werde nicht versuchen Ihnen das auszureden, wenn Sie es von Ihrem Geld bezahlen.
@Norbert Mülhauser
520gr/kWh war der Schnitt 2016, Statista gibt für 2020 366gr aus:
https://de.statista.com/statistik/daten/studie/38897/umfrage/co2-emissionsfaktor-fuer-den-strommix-in-deutschland-seit-1990/
Ist aber letztendlich uninteressant, weil jegliche Elektrifizierung sofort den Schnitt wieder nach oben treibt da er zunächst durch Fossile Kraftwerke erzeugt werden muss bzw. den aktuellen Zubau von EE rechnerisch reduziert..
@ Ute Fröhlich
Solarstromleistung kann man nicht „errichten“, sondern nur Kapazitäten. Die Leistung erbringt dann die Sonne, und im Winter halt nur 8 Stunden im abgeschrägten Winkel, und nur wenn’s die Wolken nicht vergeigen. Die Bedarfsdeckung durch Wind + Solar kommt im Winter nicht über 15 % hinaus; einmal schneit es windstill, dann wieder stürmt es zu stark, Vereisung ist auch ein Problem usw usf. Wenn über ganz Europa eine Flaute herrscht, können Sie installieren was Sie wollen ohne Deckung zu erzielen. – Allerdings hat sich der Staat in den letzten Jahrzehnten dem Bürger gegenüber eine Autoritätsstellung ertrotzt, dass Rationierungen a la Nordkorea kein Problem mehr sein dürften.
Ich finde die Diskussion sehr interessant, vielen Dank für die nützlichen Infos aus erster Hand, und auch den guten Fachbeitrag. Vollkommen logisch, dass diese E-Autos immer grüner werden, wenn wir jährlich mehr NEUE grüne Energie produzieren, als durch NEUE E-Autos und neue Strom-Heizungen verbraucht wird. Und wie Herr Stiller schreibt, sinkt der CO2-Ausstoß unseres Strommixes ja gewaltig seit geraumer Zeit. Mich verblüfft besonders diese hohe Effizienz der E-Autos, das hätte ich nicht gedacht.
@Mia Roth
Da haben Sie es nur leider nicht verstanden. Die E-Autos werden nicht grüner und sind überhaupt nicht effizient. Sie verursachen mehr CO2 als ein moderner Diesel im Betrieb und zusätzlich duch den CO2 Rucksack der Batterie, und zwar so lange wie wir noch nicht 100% EE haben. Ein Diesel verursacht wie schon geschrieben 4,5l * 2,64kg CO2/l = 11,88kg CO2 je 100 km, ein E-Auto 20kwH * 660g CO2/kWh. Daran gibt es nichts zu rütteln. Wenn Sie neue Elektrische Verbraucher hinzufügen, dürfen Sie nicht den Durschnittswert des CO2 Austoßes des Strommixes nehmen, weil sich durch das Hinzufügen der Durchschnitt ja ändert und für Millionen andere Verbraucher erhöht, wenn auch nur minimal.
Nein da liege ich 100% richtig. Ich fahre mit dem Auto in Urlaub. Es ist der Seat Altea 1.6 TDI Ecomotive. Den Fahre ich problemlos und nicht nur angeblich, mit 110-130kmh durch Frankreich mit 4.5 Litern, worüber ich sehr froh bin weil ich dann nicht in Frankreich tanken muss. Es sind aber nur 4 Personen, ich meinte nicht mich und 4 PErsonen sondern 4 gesamt, wobei die Kinder natürlich weniger wiegen. Das Auto ist 10 Jahre alt , moderne Diesel gibt es sogar noch sparsamer. Die Verbrauchswerte können Sie auch hier überprüfen:
https://www.auto-motor-und-sport.de/marken-modelle/seat/altea/technische-daten/
Naja, wie realistisch bei einem vollbeladenen Diesel 4,5 l/100km sind, kann ja jeder Leser selbst für sich bewerten.
Und wie Sie selbst schrieben, war der CO2 Abdruck bei unserem Strom um die 330g pro kWh im letzten Jahr – das gilt doch natürlich auch für alle E-Autos, die im letzten Jahr betankt wurden. Soweit ich weiß, unterscheidet der Strom nicht zwischen Küchengeräten und E-Autos.
@Mia roth
Ja ganz besonders die die einen Fahren werden das wissen.
Ganz genau der Strom unterscheidet nichtzwichen den VErbrauchern. Und deshalb ist es so, das sobald Sie einen neuen Verbraucher hinzufügen, der CO2 Austoss dieses neuen Verbrauchers auf auf alle bisherigen Verbraucher umgelegt wird. Und da wir noch keine 100% EE haben, wird jeder neue Verbraucher zu 100% aus konventionellem Strom gedeckt. Ganz einfaches Beispiel:
wenn der Stromix bei 100kWh im Durchschnitt 366gr pro kWh verursacht und sie fügen einen neuen Verbraucher mit 50kWh hinzu, dann wird dieser neue Verbraucher zunächst von fossilem Strom betrieben. Sie haben ja einen Verbraucher hinzugefügt und keine neuen EE Stromerzeuger. Dieser neue Verbraucher hat also entsprechend dem Fossilen Stromix einen CO2 Austoss von ca. 700gr/kWh. Der neue Gesamtstrommix berechnet sich zu ((100*366) + (50*700))/ 150 = 473gr / kWh.
Sie haben also durch das hinzufügen den CO2 Ausstoß aller bisherigen Verbraucher vom Herd bis zum E-Auto erhöht und schieben diese Erhöhung solange vor sich her, bis der Gesamte Strom auf 100% umgestellt ist.
Bei der heutigen Schulbildung wundert es mich kaum das die meisten das nicht verstehen. Schlimm ist nur das Menschen wie Sie auch noch selbstsicher behaupten sie wüssten wovon sie sprechen.
Hallo Herr Stiller,
ich habe Ihr theoretisches Konstrukt verstanden, allein mir fehlt der Glaube, dass „keine neuen EE Stromerzeuger“ hinzukommen. Wie kommen Sie auf so einen Stuss? MAN BAUT DIE EE DOCH STÄNDIG AUS.
Bitte achten Sie darauf, was ich schreibe: so lange MEHR „Neuer-Grün-Strom“ produziert wird wie durch „Neu hinzugekommen E-Autos“ verbraucht wid, STEIGT der Grünstromanteil. Sie vernachlässigen schlicht und ergreifend den gleichzeitig stattfindenen Ausbau – jede 2. Klässerlin versteht das.
Es ist ganz einfach: Sagen Sie doch mal, wie hoch der CO2-Ausstoß von deb E-Autos war, welche im letzten Jahr betankt wurden? ES SIND DIE 330g / kWh. Wollen Sie das bestreiten??
Hier nochmal gaaaaanz langsamn für Sie zum Mitscreiben, hab extra recherchiert und natürlich wird hier der natürliche Menschenverstand (meiner) voll und ganz bestätigt:
CO2-Ausstoß Deutsche Strommix 2019 (laut Ihrer eignen Qulle): 408 g pro kWh
Abzahl E-Autos in 2019: 83.175 (https://de.statista.com/statistik/daten/studie/265995/umfrage/anzahl-der-elektroautos-in-deutschland/)
CO2-Ausstoß Deutsche Strommix 2019 (laut Ihrer eignen Qulle): 366 g pro kWh
Abzahl E-Autos in 2019: 137.617
=> SEHEN SIE DAS?? 50 Tausend mehr E-Autos bei GLEICHZEITIG weniger CO2-Ausstoß pro kWh?? Falls Sie recht hätten, drüfte dies nicht sen, oder???
=> WIE SIE SEHEN, gibt es natürlich (nochmal: jede 7-jährige versteht das) noch weitere Faktoren, die diesen CO2-Ausstoß bestimmen. Wie zum 3. Mal geschrieben: Der stetige Ausbau der Erneuerbaren hat – unter anderem – damit zu tun. Die weiteren Faktoren können Sie sich von Ihren Enkeln erklären lassen.
So, ich hoffe dies regt bei Ihnen ein paar Gehinrzellen an, dann war die Recherchearbeit von mir (EINER LAIIN) nicht ganz vergeben.
@Mia roth
Leider verstehen Sie gar nichts. Denn dadurch das sie immer wieder neue Verbraucher (vom öl) zum Strom überführen, bedeutet nur das sie diese von Öl zu Kohle und Gas überführen. Denn durch ständig neue Verbraucher bleiben die Kohle und Gaskraftwerke länger am Netz. Sie haben also einen effizienten Diesel in ein ineffzientes Kohlestrom-Fahrzeug umgewandelt.
EE könnte man auch genauso schnell ausbauen wenn man einfach nur die bestehenden Verbraucher erstmal auf EE Strom umstellt. Die Umstellunge einen Verbrauchers auf Strom selbst erzeugt keine erneuerbare EE. Das geht nicht.
Das ist leider nur ein Umstand ihrer Unfähigkeit das Gesamtsystem zu verstehen. Hätten wir die Zusätzlichen E-Autos nämlich nicht, wäre der CO2 Ausstoss pro kWh noch niedriger und dementsprechend weniger Anteil an Kohle und Gas nötig. Ohne die 50.000 Autos könnte man nämlich theoretisch auf die gleiche Menge an Strom verzichten, und da die EE Vorrangeinspeisung geniessen wäre der Verzicht hauptsächlich Kohlestrom, Gas und ein bischen Atomstrom. Und je schneller die EE ausgebaut werden würden desto weniger müssten die Gas und Kohlekraftwerke liefern und könnten zumindest in der Theorie früher abgeschaltet werde. Wenn sie aber vor erreichen von 100% EE immer wieder massenhaft neue elektrische Verbraucher hinzufügen müssen diese ja offensichtlich von anderen Energiequellen gespeist werden, ganz einfach oder?
Leider reicht es nicht, wenn man in der 2. Klasse war. Denn je mehr neue Verbraucher hinzukommen, desto langsamer steigt der Grünstromanteil, denn er könnte schneller steigen. Und wenn der Anteil langsamer steigt brauchen ALLE Verbraucher länger um CO2 neutral zu werden und die Kohlekraftwerke müssen länger laufen. Damit haben aber auch offensichtlich viele promovierte Schwierigkeiten, wenn ich mir so manche Professoren anschaue.
Das ist halt ein schönes Beispiel vom Dunning-Kruger effekt. Da hilft auch Ihre ganze Polemik nichts.
@Mia Roth
Offensichtlich haben sie mich da missverstanden. Ich habe da auch leider ein n vergessen:
„Sie haben ja einen Verbraucher hinzugefügt und keinen neuen EE Stromerzeuger. “ Damit ist gemeint, das das Hinzufügen eines Verbrauchers nicht dem Hinzufügen von EE Stromerzeugern gleichzusetzen ist (logisch).
Natürlich werden jedes Jahr EE hinzugebaut. Diese EE wären aber auch dann gebaut worden wenn keine neuen Verbraucher(E-Autos) auf der Verbraucherseite hinzugekommen wären und hätten dann bereits bestehende Verbraucher mit EE versorgt und den CO2 Emissionsfaktor noch stärker gesenkt.
Sie können sich auch folgendes Vorstellen:
Wenn eine Volkswirtschaft mit allen Anstrengungen jedes Jahr 5tWh EE zusätzlich schafft und wir nach langer Zeit bei den letzten 5tW Fossiler Energie angelangt sind, dann könnte man diese in einem Jahr ersetzen und hätte null CO2. Man könnte das letzte Kohlekraftwerk abschalten. Jetzt Kommt ein Schlauer Politiker und bringt neue E-Atos mit einem Verbrauch von 5tWh ins system. Jetzt sind wir wieder bei 10tWh welche noch fossil erzeugt werden, abzüglich dem Zubau von 5tWh EE bleiben wieder 5tWh übrige, das Kohlekraftwerk muss also noch ein Jahr stehen bleiben. Und eine Jahr später werden wieder 5tWh Autos hinzugefügt und wieder 5tWh EE und trotzdem muss das Kohlekraftwerk weiter stehen bleiben und so weiter, bis alle Autos auf Elektro umgestellt sind.
Hätte man erst allen Strom durch EE ersetzt, wäre das letzte Kohlekraftwerk schon längst überflüssig geworden. Dann hätte man Schritt für Schritt die Autos elektrifiziert ohne das die Kohlekraftwerke weiter betrieben werden müssten. Indem man jährlich maximal so viele Autos elektrifiziert wie man jährlich auch EE zubauen kann.
@Ute Fröhlich
Zustimmung
Das ist falsch, denn ohne die zusätzlichen E-Autos hätten die Kohele und GAskraftwerke nämlich weniger produzieren müssen.
Falsche Schlussfolgerung. Nur der EE Zubau verringert den Strom aus den Kohlekraftwerken. Die E-Autos benötigen ja Strom. wenn Sie also 5GWh Solarstrom Zubauen könnten sie 5GWh Kohlestrom einsparen. Wenn sie aber zusätzlich 1GWh neue Verbraucher z.B. als E-Auto ans Netz bringen, können Sie halt nur 4GWh Kohlestrom einsparen. Die zusätzlichen Verbraucher verursachen also den zusätzlichen Verbrauch von 1GWh Kohlestrom. Würden die E-Autos nicht gebaut würden Sie die Entsprechende Menge Kohlestrom mit einem Ausstoß von ca. 700gr/KWh vermeiden. Das sind ungefähr 14kg CO2 / pro 100 km. Außerdem würden Sie den Ausstoß von ca. 4-15 Tonnen CO2 (hier gehen die Studien recht weit auseinander) für die Batterie vermeiden. Sowie die Zusatzkosten von 10.000€ pro Elektroauto (davon könnte man z.B. den Leuten PV-Anlagen ermöglichen, welche wirklich CO2 vermeiden würden). Im Gegenzug müsste man natürlich bei einem Diesel mit 4,4-5l/100km auch ca. 11-12Kg CO2 rechnen. Erst wenn man nahe bei 100% EE ist, macht es dann wieder Sinn neue Verbraucher(Autos) zu elektrifizieren.
Und noch mal, solange Sie nicht 100% EE haben, müssen sie mit dem CO2 Ausstoß vom Kohle/Gasmix/Atom rechnen (ca. 700gr) und nicht mit dem Emissionsmix inkl. EE . Denn wenn Sie (einen beliebigen) Verbraucher vom Netz nehmen, dann werden ja auch nur die Kohlekraftwerke heruntergefahren und nicht die EE welche Einspeisevorrang genießen. Das würde ja keinen Sinn machen.
Ich zweifle dennoch das Sie oder Frau Roth das auch nur annähernd verstehen.
Nein, der zusätzliche Strom kann genauso gut aus ansonsten abgeriegelten Erneuerbaren Energien kommen. Ich wohne in Norddeutschland, und was ich in der Zeitug lese ist, dass unsere Netze z.T. übervoll sind mit Enereuerbarem Strom, so dass man die sogar immer öfter abregeln muss!! Wenn ich da ein E-Auto dran hänge, dann merkt irgendein Kohlekraftwerk davon gar nix! Ihr theoretisches Konstrukt „Einspeisevorang“ scheint eben leider in der Realität nicht zu funktionieren.
@Mia Roth
Wenn die Netze den Strom nicht Transportieren können, weil Sie dann überlastet werden, dann hilft es auch nicht weitere Verbraucher hinzuzufügen, dann MUSS abgeregelt werden.
In Allen anderen Fällen wird der Strom ins Ausland Transportiert und vermeidet dort CO2, denn dort gibt es auch noch genügend Verbraucher.
Gut, da Sie’s nicht begreifen Herr Lubert Stiller, rechne ich es Ihnen vor.
Zur Herstellung eines Liters Benzin wird 1,6 kWh Strom benötigt. Die Zahl stammt vom DOE und ich gehe davon aus, dass sich in der USA die Benzinherstellung nicht wesentlich von der in D unterscheidet.
Der deutsche Durchschnittsverbrauch beim Diesel PKW 7l/100km und beim Benziner 7,8l/100km sind ca. 11,2kWh Strom und 12,5kWh Strom.
Mit ca. 12kWh Strom kommt das E-Auto bereits ca. 60km.
Herr Stiller, das ist schlichtweg falsch. Es hat mir keine Ruhe gelassen und ich habe bei meinem Stadtwerk angerufen mit folgendem Ergebnis:
Es gibt verschiede Netzebenen, die Erneuerbaren speisen in die mittlere Ebene ein und man regelt sie ab, weil die nächst höhere Ebene schon zu voll ist UND die darunter liegende Ebene gleichzeitig ZU WENIG abnimmt. Sprich: Wenn ich ein E-Auto lade, dann kann die unterste Netzebene (ich) mehr abnehmen und somit muss dann weniger abgeregelt werden. Ich würde dann sogar 100% Erneuerbare tanken – die gleichzeitg niemandem entgehen. Die Stadtwerke nutzen sogar einen riesigen Wasserboiler, um diese Überschüsse zu verheizen.
Da muss überhaupt kein Kohlekraftwerk irgendwas mehr leisten. Das war ja der Punkt. Die 700 g / kWh sind also – bei realer Betrachtung – unzulässig. Da beisst die Maus keinen Faden ab.
@Mia Roth
Dann greift aber das, was ich von Anfang an geschrieben hatte. Sobald 100% EE erreicht werden können weitere Verbraucher hinzugenommen werden. Das kann man natürlich statt für ganz Deutschland auch für Teilnetze sehen, wenn Sie so wollen. Trotzdem werden diese nicht ausschließlich EE mit null CO2 oder gar mit dem Strommix berechnet werden können, weil diese Verbraucher nicht dazu ausgelegt sind nur dann zu Laden wenn Überschüsse da sind. Insbesondere bei E-Autos werden sicher einige mal laden wollen, auch wenn mal wochenlang kein EE Überschuss war. Außerdem werden Sie deutlich mehr E-Autos brauchen , damit zu Überschuss Zeiten auch wirklich genug an der Ladestation hängen und auch gerade Bedarf haben und nicht vielleicht vorher schon vollgeladen waren. Also wenn z.B. gerade 1000kWh Überproduktion herrschte, werden sie vielleicht nur XX % der Flotte haben die auch wirklich parat steht , diesen abzunehmen. Insofern gibt es sicher noch andere Möglichkeiten das auf bestehende Verbraucher zu Geringeren (Co2) kosten zu verteilen, z.B. indem man erst mal andere Netzgebiete mit EE Ausbaut wenn das eine schon an der Belastungsgrenze ist. Oder Indem man einfach stationäre Speicher baut, welche dann steuerbar auch zu 100% dann verfügbar sind, wenn Überschuss da ist muss ja nicht gleich ein ganzes Auto sein. Oder einfach mal Netze ausbauen. Aber mit der Gießkanne mal das ganze Land mit E-Autos zu beglücken finde ich nicht sehr effektiv bei 6000€ förderung pro Auto.
Eine sehr lange Antwort – ich habe es aber schon richtig verstanden, dass Sie mir Recht geben: E-Autos werden z.T. auch mit ansonsten abgeregelten Erneuerbaren beladen – korrekt?
Hallo Frau Mia Roth,
ich versuche es so einfach wie möglich:
Wenn Sie den Herd einschalten, dreht das nächste Kraftwerk in Sekundenbruchteile schneller, um den nun erhöhten Strombedarf durch den Herd zu decken. Sonst bricht das Netz zusammen und alle sitzen im Dunklen. Sie können physikalisch und rechnerisch korrekt nur dann mit Solarstrom tanken, wenn Sie mit dem Zuschalten des Ladens auch gleichzeitig die Intensität der Sonne erhöhen. Sie kommen nicht umhin mir Recht zu geben, dass der Sonnenschalter noch nicht erfunden wurde.
Also tanken Sie immer mit dem im Netz vorhandenen Strommix. Wenn die Sonne stärker wird, drehen die Kraftwerke runter, bei einem Wolkendurchzug drehen sie hoch. Also ohne Kraftwerke mein Strom, auch kein Solarstrom. Das ist mit Regeln gemeint, die Ebenen sind Details…
Die „Solarmeister“ hier, die angeben mit kostenlosen Eigenstrom zu laden, lügen sich in die eigene Tasche. Es ist nur so, dass diese nicht einen, sondern 3 Zähler haben, 1. wie viel die Anlage produziert, 2. wie viel Eigenstrom verkauft wird, 3. wie viel Kraftwerkstrom gekauft wird. Aus der Differenz der Zähler rechnet man sich schön, dass man mit Eigenstrom getankt hat.
Es bleibt aber wie oben beschrieben, mangels Sonnenschalter sind die Kraftwerke gefordert, wenn das Auto ans Netz verbunden wird. Und letztendlich versorgt das Kraftwerknetz Haus und Auto, die Zähler versüßen dem Besitzer nur die Preise: Wenn die Sonne scheint, scheint sie überall und die Kraftwerke fahren runter, kosten aber trotzdem viel Geld. Der abgenommene Solarstrom kostet dem Versorger viel Geld, manchmal muss nochmal Geld darauf gelegt werden, um den „Überstrom“ im Ausland los zu werden. Die Kraftwerke können aber nicht abgeschaltet werden, da die nächste Wolke garantiert kommt. Der PV-Besitzer zahlt dabei nichts, da seine Zähler Verkauf anzeigen, zahlen tun für ihn alle andere.
Durch die eigentlich verbrecherischen Gesetze können Sie Geld sparen, indem Sie eine PV-Anlage betreiben. Es ist aber nicht so, dass Sie dann mit eigenen kostenlosen Solarstrom tanken, sondern das andere Ihre Stromrechnung bezahlen. Auch die Mio Haushalte, die im dunklen sitzen, weil sie Ihre Stromrechnung nicht bezahlen können. Wenn Sie damit leben können, tun Sie es. Aber glauben sie nicht, dass sie kostenlosen Strom produzieren!
@Mia Roth
Nun, ich habe ja von beginn an geschrieben, das neue Verbraucher nur dann Sinn machen, wenn 100% (oder auch nahezu 100%) EE erreicht sind. Und impliziert das auch, das bei überschreiten ein Verbraucher mit ansonsten abgeriegelten EE versorgt werden kann. Nur wie viel ist das tatsächlich? Mit Sicherheit nicht so viel, da die Verbraucher (Autos) keine Steuerung enthalten, welche genau zu EE Überschuss – Zeiten laden und natürlich auch vermehrt dort stehen müssen, wo sonst abgeregelt würde. Mal abwarten wie die Zahlen 2021 aussehen werden. 2019 wurden 6482 GWh abgeriegelt. 2021 werden rund 500000 E-Autos mit einem Bedarf von 1000GWh hinzukommen.
Aber es hätte ja dann in 2019 noch viel mehr abgeregelt müssen, wenn es KEINE E-Autos im Netz gegeben hätte, die als Abnehmer zur Verfügung standen? Ohne die müsste man ja noch früher abschalten. Vielleicht kam es in manchen Regionen allein deshalb nicht zum Abregeln, EBEN WEIL dort viele E-Autos geladen wurden.
Also wenn Sie sagen, es gibt einige „100%-Erneuerbare-Energie-Inseln“, in denen E-Autos tatsächlich das Abregeln verhindern, gehen Sie dann auch mit, dass diese weit unterhalb von 700 g / kWh liegen? Es wäre als Durschnitt demnach nicht zu verwenden.
@Mia Roth
2019 gab es 50000 Elektroautos mit einem Jaharesbedarf von vielleicht 100GWh. Man wird frühestens im Ergebnis von 2021 sehen können. Meine Prognose ist das da nicht viel bei rauskommt.
@Mia Roth
Bauen sie die mal für einen Gesamtstrombedarf von grob für 2 Wochen Dunkelflaute. Ich habe gerade eine Studie gelesen das solche Dunkelflauten auch gerne mal 2-3 mal im Winter hintereinander vorkommen können. Dann bräuchte man zur Vollversorge 4-6 Wochen Batteriespeicher. Ich meine erste Batterieversuche kosteten 50.000.000€ für ca. 117MWh
Im Durchschnitt benötigen wir ohne E-Autos derzeit 1,6TWh * 28 Tage = 44,8TWh für 28 Tage, im Winter vermutlich mehr, das wären 44800000MWh für 28 Tage / 117MWh = 382905 Batterien 50 Mio Euro. Oder 19.145.250.000. Durch die Elektrifizierung des Autos kommt noch mal einiges dazu und Wintertage mit Mehrverbrauch. Also vielleicht 30 Milliarden €. Die wiederum auch dann alle 20 Jahre vermutlich anfallen, plus Betriebskosten.
Aber recherchieren Sie bitte selbst, ich habe das nur grob recherchiert, denke aber das es eher teuer wird, da die Rohstoffe in dieser Menge weltweit gar nicht zu Verfügung stehen würden und vermutlich habe ich viele andere Dinge nicht berücksichtigt.
Ja, das kann sein. Ehrlich gesagt habe ich in meinem mehr als 50 Jahren Norddeutschland noch nicht einmal EINE Woche ohne Wind erlebt (leider). Es gibt ja immer Naturereignisse, die unsere Energieversorgung stark beeinträchtigen können. Erdbeben und Hochwasser sind schlimm für Kernkraftwerke/Kohle, Stürme schlecht für Strommasten. Nebenbei kommt es immer wieder zu politischen Spielcen bei Gas-Pipelines… Also ein gewisses Ausfallsrisiko besteht doch überall.
Aber mir ging es jetzt eher um Klärung der von Ihnen proklamierten 700 g CO2 pro kWh beim E-Auto. Wir sind uns ja einig, dass es in der Realität gar nicht immer zum Einsatz von Kohlestrom kommt, wenn jemand ein neues E-Auto ans Netz anschließt. Diese Zahl, die Sie als Grundlage Ihrer Vergleichsrechnung benutzten, kann demnach ja nicht stimmen.
@ Lubert Stiller
Übrigens vielen Dank für Ihre gefinkelten Entgegnungen, die interessante Einblicke in Details eröffnen!
Sehr geehrter Herr Mühlhauser,
ich bin ebenfalls Ihrer Meinung, wobei ich zusätzlich noch die unendliche Geduld von Herrn Stiller bewundere. Ob sein erwähnter Dunning-Kruger – Effekt verstanden werden wird?
Sehr geehrter Herr Suntinger,
also offen gesagt halte ich in einer Debatte nichts von Vorbringen, die das persönliche Ego des Debattengegners (unnötig) verletzen. Das gilt für den Duning-Kruger-Effekt genauso wie – auf der anderen Seite – die insinuierte Unterstellung, nicht einmal auf der Ebene eines Zweitklasslers zu sein. Vorwürfe der Selbstüberschätzung oder der intellektuellen Unreife tragen nichts zum fachlichen bzw logischen Austausch bei und erinnern mich eher an an ein Wrestling-Spektakel. Ich verstehe aber auch, dass das Temperament mitunter die Oberhand gewinnt.
@………..
Nein da liege ich 100% richtig. Ich fahre mit dem Auto in Urlaub. Es ist der Seat Altea 1.6 TDI Ecomotive. Den Fahre ich problemlos und nicht nur angeblich, mit 110-130kmh durch Frankreich mit 4.5 Litern, worüber ich sehr froh bin weil ich dann nicht in Frankreich tanken muss. Es sind aber nur 4 Personen, ich meinte nicht mich und 4 PErsonen sondern 4 gesamt, wobei die Kinder natürlich weniger wiegen. Das Auto ist 10 Jahre alt , moderne Diesel gibt es sogar noch sparsamer. Die Verbrauchswerte können Sie auch hier überprüfen:
———————
das kann ich bestätigen…… Golf 3 TDI Kombi………….90 PS, 5 Gang Schaltgetriebe………bei vernüntigen Fahrten duch die Niederlande bei 120 Km / h tempolimit waren locker 1200 – 1300 Km Reichweite zu realisieren…
Sehr geehrter Herr Mühlhauser!
Ich danke Ihnen für Ihren Kommentar auf meinen Kommentar. Sehr nobel und elegant von Ihnen formuliert und geschrieben! Political Correctness?
Ich erlaube mir eine Erwiderung und zitiere Klaus P. Beer, Wahrheitsfindung durch Rede und Gegenrede: „Bei Sokrates und Platon dient die Dialektik als Methode der Gewinnung von Wahrheit durch Rede und Gegenrede. Es handelt sich demnach um eine Erkenntnismethode. Ein Dialektiker ist, nach Platon, ein Mensch, der sich auf das Fragen und Antworten versteht.“.
Ich finde es vollkommen in Ordnung, daß in obiger Diskussion sowohl die 2. Klasse als auch Dunning-Kruger erwähnt werden. Wobei Herr Stiller wohl den Nagel auf den Kopf getroffen hat. Was wohl Sokrates/Platon zum (De)Effekt „dialektisieren“ würden?
Sehr geehrter Herr Suntinger!
Nicht (eitle) „political correctness“, sondern mein Erkennen einer Art von Zirkelbezug ist Beweggrund meines Standpunktes. Denn die in den Raum gestellte Behauptung einer intellektuellen oder charakterlichen Unreife setzt als Kriterium voraus, dass ganz offensichtlich ein falscher Standpunkt ohne Vermögen zur Einsicht vertreten wird. Gerade das ist aber als Hauptthema und Daseinsgrundlage der Debatte strittig. Derartige „Urteile“ gefährden entweder überhaupt den Diskurs oder sind zumindest ein entbehrlicher Umweg.
@ Ute Fröhlich & Mia Roth
Ich eröffne besser einen neuen Strang, soll doch offenbar der fehlende „Antworten“-Button vom Fortsetzen des nachstehenden Diskussionsstranges abhalten. Also:
Werte Damen! Wie Sie der Graphik über Stromeinspeisung und – abnahme hier unter https://www.vernunftkraft.de/de/wp-content/uploads/2021/02/EEX-Januar-2021.pdf entnehmen können, belief sich die Deckung durch Windkraft 11 mal auf weniger als 10 % des mtl Bedarfsmittelwertes (dieser betrug 58,5 MW) im Januar 2021, jeweils für etliche Stunden. Geschätzte 50 % des gesamten Monats überstieg die Einspeisung von Windkraft nicht 20 % des Bedarfsmittelwertes. Nur ein einziges Mal in diesem Monat konnte für kaum mehr als eine Stunde rund 80 % des Bedarfsmittelwertes (=46,8 MW) durch Windenergie gedeckt werden. Die an Solarenergie ertragreichen Schönwetterzeiten im Sommer sind daher kein Maßstab. Für Nacht-, Regen- und Flautezeiten muss daher die „installierte Wind- & Solarstromleistung“ bei PV um 100 % und bei Wind um 95 % abgeschrieben werden, um überhaupt etwas aussagen zu können. Für Klima-Apostel gilt daher: entweder alles mit Windrädern zupflastern und damit auf die Vogelwelt als schützenswerte Fauna verzichten – oder von der Nomenklatura angeordnetes Frieren im Winter (samt Rückspeisung aus EV-Akkus, natürlich).
Es muss ja wie gesagt keine 100%ige Versorgung sein mit den Erneuerbaren. Stellen Sie sich mal vor, wir könnten auf 70 oder 80& unserer Energieimporte verzichten. Ich glaube das würde uns und unserre Politik erheblich „freier“ machen, sozusagen. Es werden ja aktuell auch Erneuerbare Energien abgeregelt, also wenn wir das Netz weiter ausbauen, was ja auch seit Jahren stockt, könnten die vielleicht auch mehr beitragen.
@ Mia Roth
Ja, aber die 70 % Importersparnis werden Sie im Winter nicht ohne schwerwiegendste ökologische Schäden erreichen, und außerdem meines Erachtens nur zu höheren Preisen (wegen höherer Gestehungskosten, und damit unter Inkaufnahme von Wohlstandseinbußen) als bei Energie-Importen. Wenn derzeit rund die Hälfte der Zeit im Winter weniger als 20 % des Bedarfsmittelwertes durch Ökoenergie gedeckt wird, heißt das, dass die installierte Kapazität mehr als verfünffacht werden muss, also auf deutlich mehr als ca 300 GW. 70 % davon wären noch immer jenseits von 210 GW. Und das auch nur, wenn der Anteil an stromenergiehungrigen Elektroautos nicht noch weiter steigt. Denn die PV auf dem eigenen Dach ist, wie hier schon angemerkt wurde, keine Lösung für tägliche Fahrer, sondern nur für Hausfrauen, Rentner & Sonntagsfahrer. – Interessant übrigens, dass gerade bei der Energie die progressiven Gesellschaftselemente auf Inlandsproduktion – koste es, was es wolle – Wert legen, obwohl sonst darauf gebaut wird, dass Auslandsbezug aus der ganzen Welt jedenfalls vorzuziehen ist, falls billiger (und die inländische Wertschöpfung als Kaufkraftgrundlage für Technik-Schnickschnack aus dem fernen Ausland auch mit Coaching-, Betreuungs- und Beaufsichtigungstätigkeiten klappen dürfte).
Hallo Herr Georgiev, also bei uns im Norden bauen sie gerade solche großen Stromspeicher mit der Begrümdung, nichts könnte schneller das Netz stabilieren als mit dieser Technik!? Finde ich logisch, denn wenn Sie z.B. in ihrem Auto vollgas geben, dann dauert es ja immer eine kurze Zeot, bis der Motor auf voller Drehzahl ist. Wenn Sie hingegen Ihr Radio anstellen, geht es sofort an durch den Batteriestrom.
Wie groß sollen denn Ihre „großen Stromspeicher“ werden? Und wie teuer ist dann die gespeicherte MWh.
Dass Akkus Elektroenergie speichern können und fast spontan wieder abgeben können, ist ja nun wahrlich kein Geheimnis, sondern seit über 100 Jahren bekannt, und wird in großem Stil genutzt.
Also der bei uns arbeitet schon seit ein paar Jahren und kann 5000 Haushalte versorgen: https://www.schleswig-holstein.de/DE/Landesregierung/V/_startseite/Artikel2020/III/200728_batteriespeicher_jardelund.html
Der wird auch als Pufferseicher für Schwankungen im Netz eingesetzt, läd und entläd sich quasi dauernd um Schwankungen auszugleichen. Also wie gesagt: Bei uns spürt kein Kohlekrafterk irgendetwas, wann man hier ein E-Auto anschließt. Nicht einmal ganz kurz beim Einschalten, Herr Georgiev.
@Mia Roth
Ja 5000 für einen Tag. Da brauchen sie schon 14 Stück von für 14 Tage. Das würde aber nur reichen, wenn sie im Winter so viel EE haben das sie diesen Speicher auch nach 14 Tagen Dunkelflaute wieder innerhalb von 48 Stunden wieder volladen könnten. Sie bräuchten als EE in der Menge die in 2 Tagen so viel produziert wie in 14 Tagen verbraucht wird und das im Winter. Hat laut Wikipedia rund 30 Mio Euro gekostet. Wenn man den auf 14 Tage ausbauen würde, käme man auf 80.000€ pro Haushalt zzgl. jährliche Wartungskosten. Nur 14 Tage werden nicht ausreichen.
Liebe Mia, im von Ihnen verlinkten Artikel steht „Minister Albrecht hat sich vor Ort über den Stand der Forschungsvorhaben informiert“, da wird nichts gespeichert, sondern Forschungsgelder abgefingert um später festzustellen, dass es eine Investruine ist. Fachlich noch Unfug dazu „Mit einer Kapazität von 48 Megawatt…“. Wahrscheinlich sind MWh gemeint und das sind Peanuts. Die allerdings Millionen kosten, die beim Speichern wieder einkassiert werden müssen…
Was passiert, wenn Sie bei gleichmäßiger Fahrt mit 50 km/h die Klimaanlage einschalten? Ein Teil der Energie wird vom Fahren zum Kühlen abgezweigt und das Auto müsste sofort langsamer werden. Tut es aber nicht, durch die schiere Masse, die in Bewegung gesetzt ist. Nach eine Weile haben Sie nur noch 49 und geben ist Tick mehr Gas und halten das Tempo.
So funktioniert die Netzstabilisierung. Alle Turbinen und Generatoren mit zig tausenden Tonnen Masse drehen sich exakt 3000 U/min = 50 U/Sek = 50 Herz. Ein Zuschalten eines (größeren) Verbrauchers wirkt sich wie ein ganz leichtes Bremsen, durch die schiere Masse der rotierenden Teile ändert sich die Frequenz nur minimal und wird dann langsam mit Energiezufuhr wieder auf exakt 50 gebracht. Das ist schneller und sicherer als jede Elektronik mit Batterien.
Problematisch wird es nur bei Windböen und Wolkendurchzug, weil da Zehntausende Anlagen zu bzw. abgeschaltet werden.
Bezüglich der Energiemengen hat die übergr0ße Mehrheit keine Vorstellung um die erforderlichen Dimensionen. Das verlinkte Projekt kann man mit einem Versuch vergleichen, mit einer Handybatterie einen Tesla zu fahren. Oder noch besser, Ein Kleinkind mit seinem Sparschwein beim BMW-Händler, das mit seinen gesparten Moneten dem Papa ein Traumauto zum Geburtstag kaufen will und nicht versteht, dass die Dimensionen nicht stimmen.
In Deutschland sind diesbezüglich die meisten Kleinkinder. Die Politiker auch, bis auf die mit Solar und Windaktien, die genau wissen was sie tun.
Hallo Herr Georgiev, Dank für Ihre Antwort. Ein paar Dinge, die mir Fragen aufwerfen bei Ihrer Darstellung:
Bei den Batterien ging es ja um Ihren Einwand, dass man beim Herd-Einschalten ganz kurz mehr Strom aus dem Netz bezieht – der laut Ihrer Aussage aus Kohlekraftwerken kommen muss. Das ist aber flasch, denn dafür gibt es diese Batteriespeicher. Die springen also nur ganz kurz ein, soll also ganr nicht einen ganzen Tag abdecken!? Es ging ja um die Frage, ob ein neu angeschlossenes E-Auto der Kohle zuzurechnen ist, und diese Batterie sorgt dann ja dafür, dass dies nicht einmal ganz kurz bei Einschalten der Fall ist.
Bei der Reaktionsgeschwindikeit kann ich nur auf das Gelesene und hier von anderen Teilnehmern beschriebene verweisen: der Strom ist quasi sofort da bei einer Batterie.Wenn Sie mal eine Batterie kurzschließen, dann merken Sie das. Es gibt da überhaupt keine Anlaufzeit – im Gegensatz zum Motor, richtig?
Bei den drehenden Massen, von denen ich immer wieder lese, verstehe ich nicht wo da der Unterschied zu einem drehenden Winrad ist? Das ist doch auch eine drehende Masse da oben, und die hat auch eine Trägheit.
@Marius.Frank
Bevor Sie mir vorwerfen das ich etwas nicht begreife müssen Sie das Argument erst mal vortragen, nicht wahr?
Ich hatte es schon erwähnt, wenn ich mir ein neues Auto kaufe, dann kaufe ich mir kein Durchschnittsauto der letzten 20 Jahre, sondern ein aktuelles unabhängig davon welchen Antrieb das Auto hat. Deswegen vergleiche ich auch nur aktuelle Diesel mit aktuellen E-Autos. Und da mein alter Diesel 4,5 Liter verbraucht vergleiche ich ihn mit einem vom Komfort und Größe vergleichbaren E-Auto (und noch nicht mal mit einem mit einer 80kWh Batterie, um auf eine annähernd gleiche Reichweite zu kommen)
Und wenn ich das vergleiche, dann kann ich für die 10000€ die ein vergleichbares E-Auto mehr kostet schon mal 150.000km fahren und das bei einem Literpreis der schon künstlich durch CO2 Steuer verteuert wurde . Dafür brauche ich persönlich gut und gerne 10 Jahre, dann ist ohnehin Zeit für ein neues.
Aber da das Laden von E-Autos für die meisten Bürger zwischen 30ct-70ct kostet, sind das bei 20kWh 6€ – 14€ /100km
4,5l Diesel wären 6,75€, also wenn ich nur Haushaltsstrom laden würde, spare ich 0,75€ pro 100/km. Wenn ich mich nicht verrechnet habe, dann müsste ich 1333333 (1,3 Mio) km fahren, bevor ich die 10000€ Mehrkosten eingefahren habe. Für diejenigen die an einer öffentlichen Ladestation laden müssen, mit 40ct/KWh, sieht das noch schlechter aus.
Und das obwohl der Staat hier noch ordentlich Mineralölsteuer und CO2 Steuer abkassiert. Was denken Sie, wer die Bezahlt wenn es keine Verbrenner mehr gibt?
Ich weiß, Sie werden jetzt vorrechnen das ihr Solarstrom fast nichts kostet, aber auch die Netze werden von irgendwem bezahlt werden müssen. Größere PV Produzenten müssen schon jetzt die EEG Umlage auf den Eigenverbrauch zahlen. Und wenn nicht so, holt sich der Staat das Geld auf andere Weise zurück. Auch von Ihnen.
Ich wünsche Ihnen aber viel Spass mit Ihrem E-Auto.
Im übrigen frage ich mich warum Strom überhaupt so teuer ist. Ziehen wir vom Diesel die Mineralölsteuer und CO2 Steuer ab, so bleibt ein Literpreis von weniger als 80ct. Bei 4,5l/100km wären das 3,6€ / 100km. Selbst wenn man beim Strom die EEG Umlage weglässt und 20kWh/24ct rechnen würde, kommt man auf 4,80€ für 100km elektrisch. Irgend etwas muss beim Strom doch total ineffizient sein, ich frage mich nur was.
Sie merken es leider nicht und sind damit nicht allein. Mit einer eigenen PV Anlage können nur Hausfrauen, Rentner und Sonntagsfahrer laden. Der normale Pendler fährt morgens zur Arbeit, kommt spät nach Hause, im Winter sogar zwischen dunkel an und dunkel ab, und lädt in der Nacht aus seiner PV Anlage. Wie geht das?
Knackpunkt ist und war immer was kostet das.
Benzin, Diesel oder auch E-Fuels muss man immer kaufen immer nachkaufen, dass macht keinen Sinn.
Macht es Sinn mit dem Diesel oder Benziner am Stück 1000km fahre zu können wenn man vorab immer 100€ bis 120€ an der Tankstelle lassen muss. Fahrdiesel und Fahrbenzin wird auch mit Zusatzsteuern verteuert, CO2-Steuer lässt grüßen und der Weltmachtpreis für das Fass Öl kann auch zur Kostenfalle werden.
Energie für das E-Auto und nicht nur für das E-Auto kommt an günstigsten von der Sonne von der eigenen PV-Anlage.
Die EU, Deutschland und das Bundesverfassungsgericht hat die CO2-Minderung als Marschrichtung vorgegeben da werden fossile Brennstoffe noch auf Jahre auf Jahrzehnte mit Zusatzsteuern beglückt werden.
Energieformen mit geringen zusätzlichen CO2 und Schadstoffausstoß werden die nächsten Jahre von den politischen und steuerlichen Rahmenbedingungen profitieren.
Aber nur weil es politisch so beschlossen wurde. Sobald alle Bürger erst mal gezwungen wurden umzusteigen, werden sie feststellen, das die dazu nötigen Steuern nicht mehr beim Dieselfahrer abgeknöpft werden können. und der E-Autofahrer alle kosten selbst tragen muss, selbst wenn er den Strom von seiner eigenen PV Anlage bezieht. Irgendwer muss ja am Ende für die Netze, Backupkraftwerke, Speicher, Straßenbau und Rente (derzeit alles in der Mineralölsteuer enthalten) zahlen.
Wenn es tatsächlich billiger wäre, bräuchte es die ganzen Subventionen nämlich nicht. Aber nicht mal abgeschriebene 20 Jahre alte Windkraftanlagen rechnen sich ohne weitere Subventionen so das die Betreiber diese abreißen wollten.
Ein Benziner verbraucht im Durchschnitt ca. 7,8l/100 spricht 66kWh/100km an Energie.
(und noch +18,2kg CO2/100km gehen in der Luft)
Ein Diesel-PKW verbraucht im Durchschnitt ca. 7l/100 spricht 69kWh an Energie.
(und noch +18,6kg CO2 gehen in der Luft)
Ein E-Auto nutz ca. 20kWh/100km Strom (incl. aller Verluste)
(und noch +1kg CO2 gehen in der Luft bei Solarstrom)
(und noch +8kg CO2 gehen in der Luft bei Strom aus dem Stromnetz)
@Ute Fröhlich
Ich weiß nicht was sie für einen Diesel haben, aber mein Altea XL braucht 4,5 – 5l pro 100km, mit 4 PErsonen und Gepäck.
Im Winter sinkt die Reichweite von E-Autos um bis zu 30%, dann kommen sie eher in Richtung 25KWh/100km (es sei denn sie frieren gerne).
Ihr Solarstrom ist falsch berechnet, denn es fehlen noch die Speicher oder der ggf. vernichtete überschüssige Strom. Wenn sie Strom vernichten, oder wie derzeit ins Ausland verschenken, dann haben Sie kein CO2 vermieden sondern das Ausland.
Gleiches gilt für den Strommix.
Dazu kommt das der CO2 austoss von PV garantiert falsch berechnet ist. Wartung, Versicherung, Reperatur und Entsorgung wird dort auch anfallen. Ebenso wie für ihren Lokalen Speicher, der auch einen ganz schönen CO2 Rucksack hat und selbst wenn sie nur 50km Täglich fahren, werden sie mit Speicher nicht Autark. Also die ganzen Wartung und Instandhaltung der Backupkraftwerke, Netzleitungen etc, werden weiterhin CO2 emittieren, auch wenn jeder deutsche am Ende nur noch 400kWh im Jahr verbraucht.
Wir sind jetzt gerade bei max 5% EE vom Primärenergieverbrauch. Dafür haben wir 20 Jahre gebraucht. Und das waren die niedrig hängenden Früchte (ohne Speicher). Was jetzt kommt wir extrem teuer. Denn durch eine Verdopplung der Erzeugung verdoppelt sich nicht etwa der Überschüssige Strom der vernichtet oder verschenkt werden muss, sondern er vervielfacht sich. Wenn z.B. mittags, high noon, die Produktion von PV nicht mehr 60GW erreicht sondern 120GW, der Verbrauch aber weiter bei 55GW liegt, dann müssen sie nicht 5GW loswerden, sondern 65Gw, weil sich der Verbrauch ja nicht mit verdoppelt. Dazu bräuchten sie massenhaft Speicher.
7 l/100km sind der Deutschland-Durchschnittsverbrauch bei den PKW (Diesel)
https://de.statista.com/statistik/daten/studie/484054/umfrage/durchschnittsverbrauch-pkw-in-privaten-haushalten-in-deutschland/
Herr Lubert Stiller,
Sie rechnen mit einem Diesel der unterhalb vom Durchschnitt ist.
Das kann ich natürlich auch mit einem E-Auto rechnen das weit weniger als der Durchschnitt braucht an Strom, da ändert sich nichts Grundsätzliches am Kostenvorteil beim E-Auto mit eigenen Solarstrom gegenüber den Verbrenner PKW.
Man hat doch einen Stromspeicher kostenneutral beim E-Auto bereits dabei, man braucht nicht zwingend einen zusätzlichen Stromspeicher, man braucht Solarleistung.
Und überschüssiger Solarstrom wird natürlich vernichtet z.B. zu Wärme, man braucht nicht nur Strom im Haus, auch z.B. Wärme, Warmwasser u.s.w..
Nur beim Stromverkauf ins Ausland bekommen wir mehr € je MWh als wie wir beim Import bezahlen, verschenken sieht anders aus.
2019 Stromverkauf in das Ausland 46,82 €/MWh (Jahresdurchschnitt)
2019 Stromeinkauf im Ausland für 44,96 €/MWh (Jahresdurchschnitt)
2020 Stromverkauf in das Ausland 45,27 €/MWh (Jahresdurchschnitt)
2020 Stromeinkauf im Ausland für 42,87 €/MWh (Jahresdurchschnitt)
Übrigens Herr Lubert Stiller wir importieren ca. 95% unserer benötigten Ölmengen, Rohölmengen, Gasmengen aus dem Ausland oder nicht?
Da liegen Sie daneben, dass macht die Bundesnetzagentur und andere sehr genau.
Beim Bau und Rückbau der Solaranlage kommt eine CO2 Belastung das ist aber auch beim z.B. Kohlekraftwerk auch so. Nur haut ein Kohlekraftwerk je kWh Strom das beim Kunden ankommt noch ca. 0,8kg bis 1kg CO2 zusätzlich raus und bei den ca. +0,8kg bis +1kg CO2/kWh sind die CO2 Mengen für den Bau und Rückbau vom Kohlekraftwerk noch nicht dabei.
Unter 1000kWh ziehen wir alle zusammen im Haus im Jahr aus dem Stromnetz. Normal werden am Tag ca. 6,5 kWh Strom im Haus genutzt bei uns (ohne E-Auto).
Stromspeicher sind doch extrem günstig mit ca. 250€kWh und ich kann noch mit dem Stromspeicher herumfahren.
Ein kWh Solarstrom ersetzt 0,50€ Kraftstoffkosten, besser geht es doch nicht beim Solarstrom speichern.
Wenn ein Mensch zuhause 400kWh im Jahr braucht ist Netzstrom immer noch zu günstig.
Heute muss man weniger Minuten für 1kWh Strom arbeiten als noch vor 30 Jahren in Deutschland.
Nur ist das gelogen Herr Lubert Stiller mit dem max 5% EE vom Primärenergieverbrauch
https://www.bdew.de/energie/primaerenergieverbrauch-in-deutschland-nach-energietraegern-2020/
Das sind ca. 17% im Jahr 2020, da liegt mehr als der Faktor 3 dazwischen von Ihren erfundenen „max. 5% EE“ zur Realität.
@Ute Fröhlich
Ich rechne mit einem Auto das eine Vergleichbare Leistung bringt (5 Sitzer, großer Kofferaum) und nicht mit dem Durchschnitt. Der Durchschnitt ist nämlich irrelevant. Der ist bei E-Autos nur deshalb niedriger weil die Autos im Schnitt kleiner sind weil sonst unerschwinglich. Was Sie machen wollen, ist mein Auto mit einem E-Smart vergleichen.
Wenn Sie Ihr Auto mittag in der Sonne laden können müssen Sie vermutlich nicht auf die Arbeit fahren. Entsprechend ist ein E-Auto noch kontraproduktiver, da Sie ja knapp 200.000km fahren müssen um den größeren CO2 Rucksack abzubauen.
Überschüssiger Strom wird vernichtet. Er wird zu negativen preisen im Ausland entsorgt. Derzeit noch sehr wenig, wenn aber auch Sie werden nicht Ihre Wohnung auf 28 Grad heizen nur damit der Strom verbraucht wird. Überschüssiger Strom ist Strom der unter normaler Verwendung nicht mehr benötigt wird. Sonst wäre er ja nicht überschüssig.
Das ist dem Umstand geschuldet, das der verschenkte bzw. zu negativen Preisen verkaufte Strom anteilsmäßig noch sehr gering ist, zwangsläufig aber überproportional steigen wird.
Und wir werden bald 100% unserer Solarzellen, Rohstoffe, Stahl und so weiter aus dem Ausland importieren müssen.
Was soll daran günstig sein? Rechnen Sie sich doch mal aus wieviel KWh Speicher sie brauchen um über den Winter zu kommen. Und jetzt kommen sie Bloß nicht mit ‚aber ich kann ja die letzten 400KWh im Winter aus dem Stromnetz beziehen‘. Dann nämlich würden sie die enormen Speicherkosten nur auf den Staat übertragen aber auch das zahlen die Staatsbürger dann über Steuern.
Irrelevant, denn wir stehen ständig in Konkurrenz zu anderen Staaten. Wenn es anderswo billiger wird und bei uns teuer, haben wir das nachsehen.
Das ist nicht gelogen, da habe ich mich einfach vertan. Ändert aber im Prinzip nichts. Sagen Sie mir wie sie bis 2050 das 6-Fache von dem schaffen wollen, was in den letzten 20 Jahren geschafft wurde + die Speicher?
Der Durchschnitt ist doch völlig irrelevant. Wenn mein Diesel 4,5l verbraucht und damit 11,2kg CO2 / 100km, dann macht es trotzdem keinen Sinn auf ein E-Auto mit weniger Kofferaum und Reichweite aber dafür mit mehr CO2 Ausstoß (14kg/100km) + 30000kg CO2 für die Batterie. Und wenn jemand anderes einen uralten Benziner mit x Liter fährt macht es auch keinen Sinn auf ein E-Auto mit 14kg CO2 Ausstoß (zzgl. Batterie) umzusteigen, sondern dann ist vielleicht auch ein gleichwertiger Diesel CO2 ärmer (wenn man darauf wert legt) als ein gleichwertige E-Auto.
@Ute Fröhlich
Auch hier vergleichen Sie Birnen mit Äpfeln. Sie vergessen nämlich wesentliches:
Bei einem Benzinpreis von ca. 1.55€ Fallen 65 cent Mineralösteuer und 24cent Mehrwertsteuer an. Also ungefähr 90ct für den Staatsäckel. Was glauben Sie eigentlich von wem sich der Staat das Geld holen wird, wenn alle nur noch E-Auto fahren?
Der Staat braucht dieses Geld, für Strassenbau, Rente etc. In den 30ct/kWh Stromkosten ist das nicht enthalten. Der Staat wird andere Steuern erheben und/oder auch auf den Strompreis umlegen. Auch auf Ihren Eigenverbrauch von der Solaranlage. Zusätzlich dazu, das also eine Stromladung für 100km kaum günstiger ist als bei einem Diesel, wird noch mal das dreifache an Steuern auf die Bürger umgelegt werden müssen.
Herr Stiller, ich glaube Sie haben sich da etwas verrannt. Ich habe die spannende Diskussion von oben bis unten gelesen und muss sagen: Sie haben sich beim CO2-Ausstoß vertan, Sie haben sich beim Anteil EE an der Primärenergie vertan, Sie fahren angeblich mit einem vollbeladenen und mit 5 Personen besetzten Diesel durc die Gegend mit 4,5l pro 100km…. Herr Stiller, Sie liegen dabei ja nicht nur ein bisschen falsch, sondern SEHR stark daneben. Ich denke wirklich, Sie sollten sich bei Fau Fröhlich für den nonsense entschuldigen. Ihnen Frau Fröhlich danke ich sehr für ihre Mühnen die für jeden offensichtlich FUNDIERTEN Aussagen.
Frau Fröhlich, mein Benziner verbraucht deutlich mehr als 66 KWh auf 100, da ich Komfort sehr schätze. Wenn ich es mir nicht leisten könnte, würde ich es nicht tun. Das viele CO2 puste ich mit der Hoffnung auf besseres Wetter als letzten Monat aus.
Wichtig ist mir vor allem die Ladeleistung von 30 MW (500 KWh in 60 s). Wenn Sie diese Ladeleistung beim E erfinden, steige ich um.
Die Ladeleistung spielt doch praktisch keine große Rolle, da PKW‘s 90% bis 95% der Zeit nur herumsteht. Wir laden das E-Auto automatisiert mit Solastromüberschuss bis max. 3,6kW und das klappt wunderbar, 2021 noch keine Ausgaben für Energie beim E-Auto.
Sie Herr Peter Georgiev fahren ja zu Spitzenzeiten 80.000km im Jahr (plus Urlaubsreisen), sitzen also 1200 bis 1300 Stunden im Jahr im Auto und lassen an der Tankstelle ca. 10.000€, Sie können sich es ja leisten.
Gibt da nur ein kleiner Problem Herr Peter Georgiev.
Die Lebenszeit ist begrenzt und ob es Sinn macht ca. 1300 Stunden im PKW im Jahr zu verbringen ist auch fraglich.
„Sie Herr Peter Georgiev fahren ja zu Spitzenzeiten 80.000km im Jahr (plus Urlaubsreisen), sitzen also 1200 bis 1300 Stunden im Jahr im Auto!“
Sehr falsch!
Du Summe war beruflich bedingt, wobei der Computer eine Durchschnittsgeschwindigkeit von rund 140 km/h berechnet hat, so lange der Motor lieft. Nach Adam Riese also 571 Stunden, also 2-3 Mal weniger als Ihre Kalkulation, aber exakt. Es ersetzte das Sitzen im Büro, zumindest zu 80 %.
„Die Lebenszeit ist begrenzt und ob es Sinn macht ca. 1300 Stunden im PKW im Jahr zu verbringen ist auch fraglich.“
Sehr sehr falsch!
Fahre nunmehr nur zu Schwiegereltern 800 km oder in den Urlaub maximal um die 1000 km. Bei der ersten Reise müsste ich mit E-Antrieb 6-7 Stunden sinnlos irgendwo ladewarten, in der Zeit hab ich die ganze Strecke hinter mir, bei der zweiten käme ich langsam auf 10 Stunden (Kalkulation 2h a 200 km, bei meinem Tempo schafft keiner über 250 und schieben will ich nicht. Für Vollladen reicht die Stunde nicht). Aber nur so lange Batterieautos die Ausnahme sind. bei einige Millionen E-Autos durfte sich jeder einzelne Ladevorgang auf 10 Stunden hinziehen. Egal wieviel Säulen, bei Millionen Autos auf der Urlaubsstrecke braucht man 10-20 zusätzliche Kraftwerke, oder ein Notstromaggregat im Kofferraum.
Meine Lebenszeit ist mir viel zu schade, um Ladezeit an der Tankstelle oder beim Schleichen im Windschatten der LKWs zu verbringen!
Was Sie oder der Durchschnitt tut ist mir Wurst, ich reise meistens effektiver als der Rest.
In der Stadt steht mein Reiseauto übrigens häufig in der Garage, aber auch die Alternative ist Wunschgemäß immer steckeunabhängig fahrbereit.
Sie können sich gern den Unsinn schönreden, wobei als mobile Einkaustasche oder zu Angeben auf Kurzstrecken kann man ihr Ding natürlich verwenden!
Kleiner Nachtrag noch Frau Fröhlich:
Mein Lebensinhalt ist, mein eigenes Fleisch und Blut jeden Tag beim Erwachsenwerden zu helfen.
Daraus ergibt sich, dass Reisepausen und Geschwindigkeit nicht das Auto vorschreiben kann, sondern die dreifache Ausführung der Fragenwiederholung „Wann sind wir denn endlich daaaa…???“, wobei die Frequenz die 60 mal pro Minute erreicht. Da kann man nicht mit CO2, Weltrettung oder Durchschnittsverbrauch und Durchschnittsfahrzeit argumentieren, sondern muss die Reiseplanung nach den Kindern und nicht nach dem Akku ausrichten.
Wenn Ihre Lebensinhalt ist, CO2 einzusparen, aus welchen vorgeschobenen Grund auch immer, dann bleiben Sie glücklich mit Ihrer Grasernährung und elektrischen Schleichfahrten. Sie repräsentieren aber nicht die Mehrheit und schon gar nicht die Zukunft, da ohne Kinder keine Zukunft der Menschheit!
Sehr geehrte Frau Fröhlich,
und andere Leser. Eine Diskussion über die Verwendung von Lebenszeit ist nicht produktiv.
Mir hat auch schon mal einer ausgerechnet, wie viel Stunden / Tage im Leben ich schlafe. Die Konsequenz wäre doch, nicht zu schlafen. Ob ich das lange durchhalte ist eine Sache, aber ich bin bestimmt ungenießbar. Weitere Rechenbeispiele sind beliebig zu finden: Zähneputzen, duschen, Essen oder gar die Entsorgung usw.
Wenn es Spaß macht und gut tut, ist doch alles in Ordnung, das gehört dazu. Nur der Ärger über den Fachkräftemangel unserer Volksvertreter ist negativ in der Bilanz.
Hondas Hybrid fährt ausschließlich elektrisch, der Verbrennungsmotor läuft in einer verbrauchsgünstigen Drehzahl und lädt ständig Strom nach. (bei etwa 100 km/h wird der Verbrenner starr mit der Achse verbunden – kein Schaltgetriebe – um auch die elektrischen Lade./Entladeverluste zu sparen).
Herr Demmig,
Wenn bei 100 km/h das Schaltgetrieben ausgeschaltet wird, dann ist das sowas, wie die höchste Gangstufe, ist das richtig so?
Wegen der Umwandlungsverluste ist es unwahrscheinlich, dass ein solches Auto (Umwandlung von Benzin in Strom, also ein kleines Aggregat) irgendeine Einsparung gegenüber dem herkömmlichen Auto bringt. Vom ursprünlichen Zweck – CO2-Minderung – ganz zu schweigen. Oder ist das ursprüngliche Ziel das Drangsalieren der Bevölkerung? Was sind die Parameter (Kaufpreis, Verbrauch, Beschleunigung, Höchstgeschwindigkeit) eines solchen Autos?
Sehr geehrter Herr Jozsef,
es wird kein Getriebe angeschaltet, sondern es gibt kein Getriebe. Verbrennermotor und Fahrwerk sind so abgestimmt, dass sie praktisch als einzige und gewissermaßen letzte Stufe bei 100 zusammengeschalter werden und vielleicht bis 150 beschleunigen kann.
Bis 100 fährt er rein elektrisch und braucht daher kein Getriebe, da der E Motor bei der Anfahrt genügend Drehmoment hat und sehr hohe Drehzahlen. Ein sehr geringes Einsparpotenzial liegt darin, dass man das für den Verbrenner sehr ungünstige Anfahrtsituation mit Energieverschwendung umgeht. Allerdings nur im Stadtverkehr, ansonsten ist es eine Energievernichtungsanlage.
Die Besitzer machen sich etwas vor, indem sie immerzu zwischenladen und an der Tankstelle daher weniger bezahlen. Dass in 12-15 Monate die Pauschale für den Stromversorger deutlich steigt, wird nicht eingerechnet. Der Fahrstrom wird auch (noch) nicht mit Zusatzsteuern verteuert.
Und diese Sorte Hybride haben ein E in der Zulassungsnummer, dürfen also mehr im Straßenverkehr und werden gefördert.
So etwas nennt man Selbsbetrug.
Nebenbei….. die Tafel zur Kutsche im Museum ist schlecht geschrieben.
Coupes waren 2-Sitzer…… wurden aber immer als 3/4 Sitzer hergestellt.
Das heisst, sie hatten eine voll ausgepolsterte bequeme 2-er Sitzbank in Fahrtrichtung und eine ……meistens klappbare Bank als Kindersitz vorne gegen die Fahrtrichtung. Das auf dem Foto ist aber ein 4-Plätzer……. was man bei Pferdekutschen so nahezu nie herstellte.
Lustig bei dem Fahrzeug das man anstatt einem echten Fahrersitz 2 drehbare Vordersitze einbaute.
Wer fuhr das Auto und wie ???
Also für die Zeit ein echter Hingucker ….. und mit seinem Polster aus beigem Seidenrips und dem Himmel aus Rosa Seidentaft auch sein sehr teures Fahrzeug.
Ein vergleichbarer Wagen mit einem Fahrgestell samt Motor von Peugeot, welches die Schweizer Firma Saurer so einkaufte und dann hier aufgebaut und ausgestattet hat, kostete 1911 satte 13ooo Franken.
Das war so teuer, das der Chef von Saurer damals meinte ……….das es dafür nie einen breiten Markt geben würde, kaum einer könne sich das leisten. Er gab den Autobau dann auf und produzierte Lastwagen…… die nahezu in jeder Armee des 1. Weltkrieges eingesetzt wurden, bei Franzosen und Engländern, Deutschen und Italienern.
Übrigens, wer glaubt, die Neuzulassungen an E-Autos in Deutschland aufgrund der BaFa Förderung (6000€ Umweltprämie) wäre nachhaltig, der sollte sich diese ARtikel mal durchlesen:
https://www.giga.de/news/dank-gesetzesluecke-so-fahren-e-auto-kaeufer-6-monate-umsonst/
https://teslamag.de/news/6-monate-tesla-model-3-kostenlos-nutzen-haendler-ohne-verkauf-risiko-40642
Wenn die Förderung ausläuft wird das Kartenhaus sicherlich wieder zusammenfallen. Dem Staat wird dann nichts anderes übrig bleiben, als Dauerförderung und noch höhere CO2 Steuern. Da kann man sich schon mal auf was gefasst machen.
Insgesamt hilfreich. „Andererseits wird beim Anfahren Energie vergeudet“ – hier zeigt sich der Vorteil des Vollhydrid, der hierfür Elektromotor und eine ca. 1 kWh-Batterie einsetzt, die im günstigen Drehzahlbereich und/oder mit Bremsenergie wieder aufgeladen wird. Aber hierzulande zählt der grüne CO2-Wahn, da ist nichts zu machen. Für kluge Lösungen ist da kein Platz mehr.
Wenn man überwiegend in der Stadt fährt, ist der normale Hybrid sehr empfehlenswert, man spart Energie und auf der Autobahn hat man kaum bis keine Nachteile. Gefördert werden aber die Plug in, die praktisch eine Dieselgenerator haben und elektrisch fahren. In der Stadt spart man minimal, bei gleichmäßiger Fahrt vergeudet man unweigerlich Energie, da die schon vorhandene mechanische Energie in Strom und zurück in Bewegung umgewandelt wird.
Wir sind uns einig, dass im ehemaligen Land der Denker nur Unsinn vorankommt.
Sehr geehrter Herr Demmig,
ich möchte gerne Ihre Ausführungen ergänzen, in dem Sinne, was sich aus den Drehmoment/Drehzahl Diagramme schlussendlich als Leistungsabgabe der verschiedenen Antriebe ergibt.
Beim Verbrenner ist das höchste Drehmoment (also Beschleunigung/Anzug) bei mittleren Drehzahlen. Daher ist ein Getriebe unumgänglich.
Beim Elektroantrieb ist die Leistung ziemlich konstant, also je höher die Drehzahl, desto geringer das Drehmoment und es werden keine Getriebe verwendet.
Daraus ergibt sich für den Verbrenner durch die Getriebeübersetzung immer ein günstiger Drehzahlbereich mit maximalen Drehmoment, bis die Leistungsgrenze des Motors erreicht ist. Andererseits wird beim Anfahren Energie vergeudet.
Beim E-Antrieb hat man das maximale Drehmoment beim Anfahren, daher der (überflüssige) Raketenstart an der Ampel, je höher aber die Drehzahl (sprich Geschwindigkeit) ist, desto geringer das Moment und damit die Beschleunigungswerte, bis zum „verhungern“. Selbst der mit unendlichen Leistungsreserven ausgestattete Tesla S, der von 0-100 der Formel 1 nahe kommt, hat bei der Elastizität (100-200) nur gute Werte von 13 s. Gemäß einem Test der „Welt“ aber nur 2 mal bei frischer Batterie, danach wird zum Schutze der Reichweite abgeriegelt und in schneckenlahmen 36 s beschleunigt!
Also das immer überlegen Moment/Beschleunigungsvermögen entpuppt sich beim näheren Hinsehen als Märchen. Für Autobahnfahrten ist es für mich und vielen anderen Fahrern das Wichtigste, nach der verkehrsbedingten langsamen Fahrt wieder auf Reisegeschwindigkeit zu beschleunigen. Das geben E-Antriebe physikalisch bedingt nicht her.
Ein anderes Märchen unter E-Fahrern ist, beim schnelleren Fahren erhöht sich sehr der Energieverbrauch. Richtiger ist, im Stadtverkehr vergeuden Verbrenner beim ständigen Anfahren sehr viel Energie, daher ist kaum ein Verbrauchsunterschied zwischen Stadtverkehr und zügiger Autobahnfahrt festzustellen. Das „Anfahrtproblem“ hat der E nicht und verbraucht in der Stadt deutlich weniger Energie. Bei gleichmäßiger Fahrt ist dieser Vorteil nicht mehr da und der Energieverbrauch nähert sich an. Also nicht die „schnelle Fahrt schluckt Energie“, sondern „beim ständigen Anfahren spart man gegenüber dem Verbrenner wirklich viel Energie, und bei zügiger Fahrt schlägt die Physik dann zu“
Wenn man es hat und will, als Zweitwagen zum Einkaufen, sonst nicht zu gebrauchen.
Sehr geehrter Herr Georgiev,
danke für die weitere Ausführung und Erklärungen. Vielleicht wäre ein sinnvoller Einsatz auch bei Pflegediensten, Apothekenlieferdiensten und Taxen im kurzen Stop- and Go-Kurzstreckenbereich im Stadtverkehr denkbar ?
Mit Grüßen
Sehr geehrter Herr Blumenreuter,
Es gibt sicher viele Anwendungsmöglichkeiten, immer dann, wenn kurze Stadstrecken mit wenig Last und lange Standzeiten technologisch vorgegeben sind. Bei Taxen denke ich, dass sie viel fahren und möglich kurz stehen sollen, dann eher nicht…
MfG
Ja, es gibt ein paar interessante Nischen für Elektrofahrzeuge!
Ich schrieb in einem anderen Zusammenhang über Postzustellung bei uns, ländlicher Raum. Die tägliche Tour unserer Zustellerin beträgt etwa 15 km pro Tag, das Fahrzeug wird meist nur wenige Meter von Haus zu Haus bewegt, also ständig anfahren und bremsen. Wären die Dinger nicht so oft in der Werkstatt, sollte Elektroantrieb in dem Fall sogar echt wirtschaftlich sein. Gestern waren 3 von 8 Zustellfahrzeugen offensichtlich wieder in der Werkstatt.
Als junger Mann fuhr ich mal Medikamente für eine Apotheke in einer Großstadt aus.
Es gab durchaus ein paar Kunden, die weniger als 1 km voneinander entfernt waren. Es gab auch ein paar Großkunden wie Praxen oder Pflegeheime. Mal 30 km fast am Stück fahren fand ich gut, ich bekam zusätzlich eine gute Kilometerpauschale.
Als kleines Kind fragte ich Papa, was das da für komische Autos mit Paketen auf dem Bahnsteig sind.
Er erklärte es mir, die bringen Briefe und Pakete von und zum nächsten großen Postamt.
Alternative argumentieren gern mit second live bei Akkus, das war wirklich so ein Fall!
Man darf nicht vergessen, zur Post gehörte damals auch Telefon. Die Akkus in den Fahrzeugen stammten aus den Postvermittlungsstellen, damals ging noch das analoge Telefon bei Stromausfall. Waren die Bleiakkus aus dem Toleranzbereich, kamen sie in die Elektrokarren. Für z.B. eine Stunde Betrieb pro Tag reichten die noch, wenn sie für viele Stunden Notstrombetrieb nicht mehr geeignet waren.
Sehr geehrter Herr Georgiev,
danke für Ihre Ergänzungen. Den „Faden“ möchte ich gerne etwas weiter spinnen. Wie Sie schon richtig beschrieben, kann der Elektromotor bis zum erreichen der maximal – verfügbaren / erlaubten Spannung mit maximalem Moment beschleunigen (in obiger Kennlinie des Reihenschlußmotors als Pkt. 1 bezeichnet, bei etwa 1/3 Geschwindigkeit). Danach ist das realisierbare Moment geringer, nach dem Pkt. 2 (Feldschwächung bzw. Frequenzerhöhung (3~) ausgereizt), danach geht es mit der physikalischen Kennlinie unweigerlich gegen Null. Der Schnittpunkt mit dem Fahrwiderstand ist dann Höchstgeschwindigkeit.
Also, wie oben schon beschrieben, tolle Beschleunigung untenrum, oben rum nicht besser als Verbrenner.
Durch eine längere Übersetzung könnte ich natürlich den Pkt. 1 zu höheren Drehzahlen verschieben, nur – dann wird der Motor unten rum zu heiß. Also kein Vorteil ohne Nachteil.
Es wird auch gerne immer auf Energierückspeisung beim Bremsen hingewiesen. Theoretisch könnte bis zu 40% zurückgespeist werden – bei Spitzfahrt, Volle Pulle beschleunigen, voll Bremsen – das ist aber leider nicht realistisch. U-Bahnen die einen Anfahr – Brems Zyklus nutzen, erreicht man etwa 20%, alle anderen Bahnen weniger.
Der optimale Energieverbrauch ergibt sich bei maximaler Anfahrt, dann auslaufen und zügig zum Zielpunkt bremsen. PKWs in der Stadt, mit „angepasster, sanfter Fahrweise“ , da ist nicht viel, was zurückgespeist werden kann.
Danke für die Ergänzungen Herr Demmig!
Das man ca. 20% mehr Reichweite (im Jahresdurchschnitt) hat beim E-Auto ist ja kein Geheimis.
Hab ist auch bereits selber getestet, die Rekuperation AUS und dann schafft man ca. 20% weniger km mit der Akkuladung.
Egal ob 10% oder doch 20% die Rekuperation bringt an km ist nicht so entscheident, beim Verbrenner PKW geht kein Tropfen Benzin oder Diesel zurück in den Tank egal ob man bergab fährt oder bremst.
Auch das vorausschauende fahren bringt keinen Vorteil für den Verbrenner, denn vorrauschauend kann man mit dem E-Auto auch fahren.
Nur beim Bremsenverschleiß da wird es beim Verbrenner PKW erst richtig interessant, da halten die vom E-Auto bei gleicher Fahrweise um das X-fache länger.
@Marius.Frank
Dafür gibt es ja Plugin-Hybride, die diesen Nachteil wettmachen
Es bringt zwar keinen Vorteil, aber es egalisiert die Rekuperation. Wenn ich (sehr) vorausschauend fahre muss ich eben nicht Bremsen und auch keine Motorbremse durchführen. Aber ich gebe zu das werden die meisten Menschen nicht optimal tun. Demgegenüber steht allerdings auch die Heizung im Winter welche beim Verbrenner aus der Abwärme gespeist wird. Mein Kollege hat darüber schon geflucht weil er im eiskalten Auto fahren musste. Hoffen wir das dies die einzige Nebenwirkung bleibt und die Fahrer nicht beschlagene Scheiben in Kauf nehmen um Reichweite zu bekommen.
Wenn ich Vorrauschauend Fahre habe ich auch beim Verbrenner wenig Bremsverschleiß. Beim E-Auto geht das natürlich viel bequemer über die Rekuperation automatisch, so das es aber vermehrt zu Rost kommen kann:
https://ecomento.de/2017/10/24/adac-warnt-elektroauto-bremsen-rosten/
Ob das nur ‚richtig interessant‘ ist oder nur marginal, wird sich wohl erst noch herauskristallisieren.
Physik 5 bis 6 Frank.
Erstens, klassische Hybride, also Verbrenner plus kleiner E-Motor und Rekuperation bringt die gleiche Ersparnis wie bei Ihrem E. Darum ging es eigentlich, man muss keine Batterieauto haben um Bremsenergie zurückzuholen.
Zweitens und entscheidend, nur im Stadtverkehr, wo man auch Fahrrad fahren kann. Bei gleichmäßiger fahrt verbraucht der Hybrid ein Tick mehr, da der Hybrid Klimbim mitgeschleppt werden muss und jedes Kilo mehr mehr Energie fordert.
Hybride rechnen sich nur in der Stadt, Batterieautos sowieso.